

Electromagnetically needle selecting method of computerized flat knitting machine based on Q15 fixed-point algorithm
A fixed-point algorithm, computerized flat knitting technology, applied in flat knitting, knitting, weft knitting and other directions with separate action needles, which can solve the problems of inconvenient production and management, increased rack and copper head costs, and high prices. Fast processing, manufacturing cost savings, improved speed and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
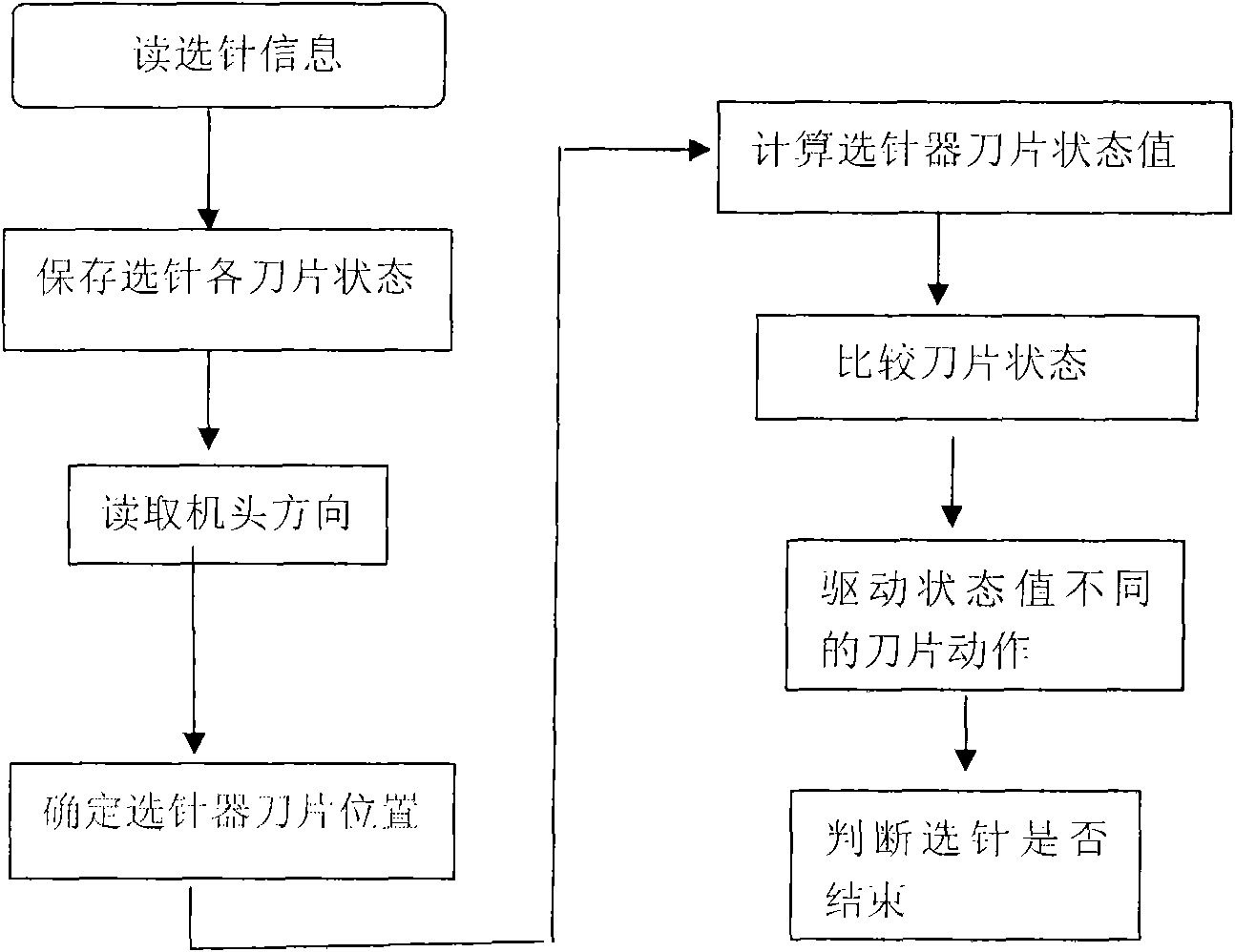
Method used
Image



Examples
Embodiment 1
[0029] The present invention is d needles for weft knitting mode, width is 1 inch domestic flat knitting machine control system adopts fixed-point algorithm to realize needle selection and makes following analysis:
[0030] The so-called d needles mean that there are d needles within one inch of the needle bed, that is, the needle distance d; the width of the flat knitting machine refers to the maximum width l of knitting on the flat knitting machine. This project uses the built-in encoder of the servo motor to read the needle. It is assumed that the number of pulses required to drive the servo motor to move a width on the needle plate is pulse; the total number of needles is total_pins.
[0031] The total number of machine needles = machine length (inch) * needle pitch, thus,
[0032] Total number of machine needles: total_pins=l*d
[0033] The corresponding pulse number of each pin is: pin_plse=pulse / total_pins
[0034] Assuming that the current value of the pulse number r...
Embodiment 2
[0064] Explain the specific application of Q15 fixed-point algorithm in the control system of 12-needle weft-knitting flat knitting machine with a width of 52 inches.
[0065] Total number of machine needles: total_pins=l*d=52*12=624;
[0066] The number of pulses that need to be sent to drive the servo motor to move on the needle plate for one cycle is pulse=26416
[0067] The corresponding pulse number of each pin is: pin_pulse=pulse / total_pins=26416 / 624=42.33;
[0068] For any position of the machine head running, the pulse amount of the corresponding encoder is current_pulse,
[0069] Suppose current_pulse=1000,
[0070] current_pin=current_pulse*(l / pin_pulse)=1000*(l / pin_pulse)
[0071] let l / pin_pulse = pp;
[0072] pp=l / pin_pulse=1 / 42.33=0.0236
[0073] According to the above analysis, it can be seen that Qx=0, Qy=15, and Qz=0 in combination with (4), therefore, x=1000, y=0.0236*32767=773, that is, the y floating-point value is processed by Q15.
[0074] temp=1000...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More