

On-line identification and control method for parameter of alternating current position servo system model
A model parameter, servo system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult implementation, high hardware requirements of control system, and complex design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
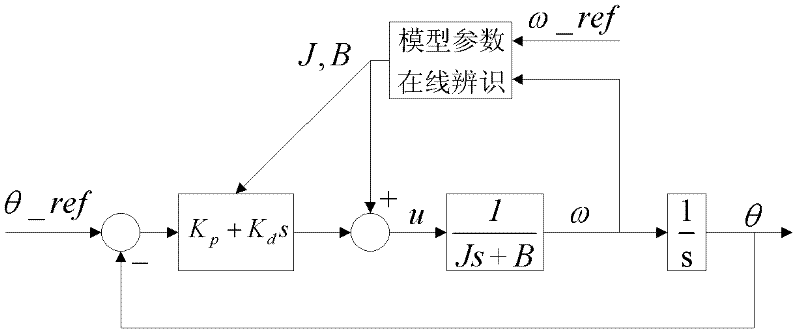
[0025] figure 1 middle Indicates the mathematical model of the controlled object of the AC servo system, J and B are the model parameters of the controlled object of the AC servo system, the moment of inertia and the viscous damping coefficient, K p +K d s is the position controller, θ_ref is the position control input reference signal of the system, and ω_ref is the external reference signal for identification input. The mathematical model of the controlled object is expressed by a first-order differential equation as Where ω is the system output speed, u is the speed loop input.
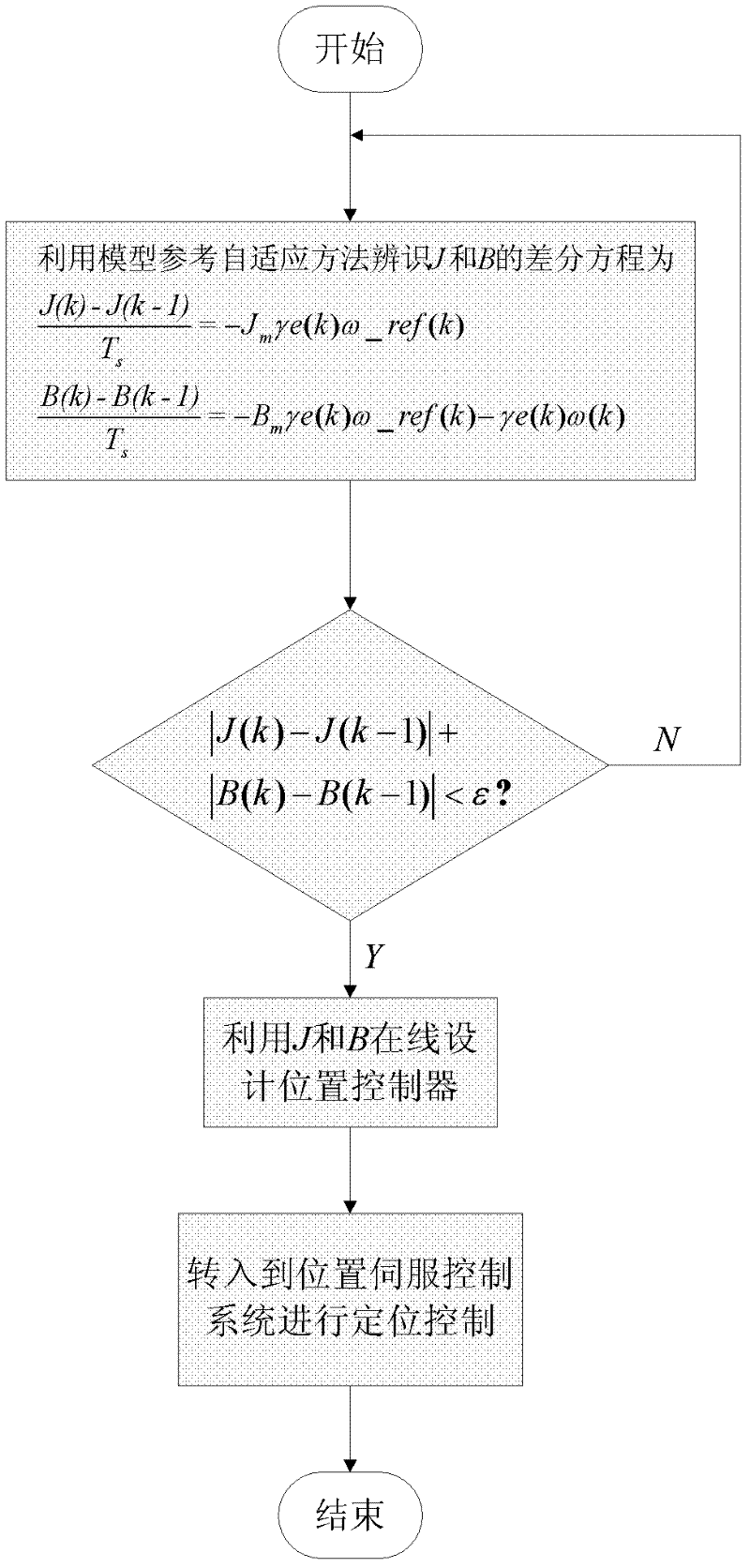
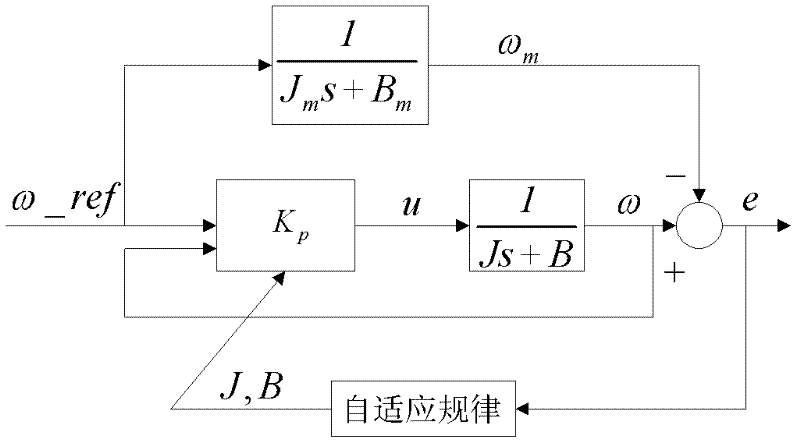
[0026] figure 2 middle J ( k ) - J ( k - 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More