

Control algorithm for regulating paddle screw pitch and host revolving speed matching during startup of ship
A technology of control algorithm and pitch, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as overload and no effective solution, and achieve the effect of ensuring thrust output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0018] The thrust P obtained by the ship through the propeller is a key indicator to measure the maneuverability of the ship. The acceleration obtained by the ship is directly related to the thrust P, which can be expressed as formula (12): m*a=P-R (12) where m is the total weight of the ship, a is the acceleration, and R is the total resistance of the ship.
[0019] When the P value is larger, the acceleration of the ship is greater and the maneuverability is better. Thrust P can be expressed as formula (1): P=K P ρn 2 D. P 4 (1) where ρ is the density of water, K P is the thrust coefficient, n is the rotational speed, D P is the paddle diameter. Thrust coefficient K P For: K P =a 1 lambda p 2 +a 2 lambda p +a 3 (2) In the formula, a 1 、a 2 、a 3 is the curve fitting parameter of propeller dripping water test results, λ p is the advancing speed coefficient: λ p =(1-ω)H / D P (3).
[0020] Since the total resistance of the ship (including friction resistanc...
Embodiment 2
[0037] A set of specific numerical values obtained through experiments will further explain the present invention. The water density in the formula ρ=1, the propeller diameter D p =2, wake coefficient ω=0.2, total resistance constant coefficient ζ=2, navigating wet area Ω=100, comprehensive transmission efficiency η c = 0.9, hull efficiency η s = 0.9,k 1 =0.3,k 2 =0.7,k 3 = 0.5,k 4 =0.5. The rotational speed n is divided into 10 equal parts, and the pitch H is divided into 5 equal parts, so that n is 0-9 and H is 0-4. The ship has just started, at this time H is 0, n is 0, substituting formulas (1) to (9) to obtain J 1 =0.000000, as the current J 1 value. When H is 0 and n is 1, get J 1 =2.737294, and with the current J 1 Compare, greater than the current value. Take H as 0 and n as 1. By analogy, take out J with n ranging from 0 to 9 and H ranging from 0 to 4 1 value, and and the current J 1 value (i.e. H is 0, n is 0 for J 1 value) comparison. When the obt...
Embodiment 3
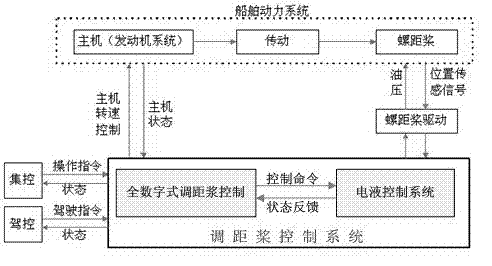
[0039] Such as figure 1 As shown, taking one of the controllable pitch propeller control systems of the optimal starting algorithm of the present invention as an example, the working process of the present invention is described in detail.
[0040] The control system uses the high-speed and reliable CAN bus as the transmission carrier of digital information, and uses the high-performance ARM7 chip as the main control chip. It is designed and developed with information processing, optimal matching control, system status monitoring, host overload protection, information storage, etc. Functional modular controllable pitch propeller embedded control system. The high-performance embedded control host takes the high-performance ARM7 CPU chip as the core, uses the multi-channel isolated CAN bus as the communication means, and is equipped with large-capacity program memory, data memory and large-capacity solid-state data recording chip. The operating frequency of the high-performance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More