

High-speed vision capture apparatus of moving object characteristic
A technology for visual capture and moving targets, applied in the field of high-speed visual capture devices for moving target features, can solve the problems of low transmission speed, large amount of data, low real-time processing speed, etc., and achieve the effect of improving processing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
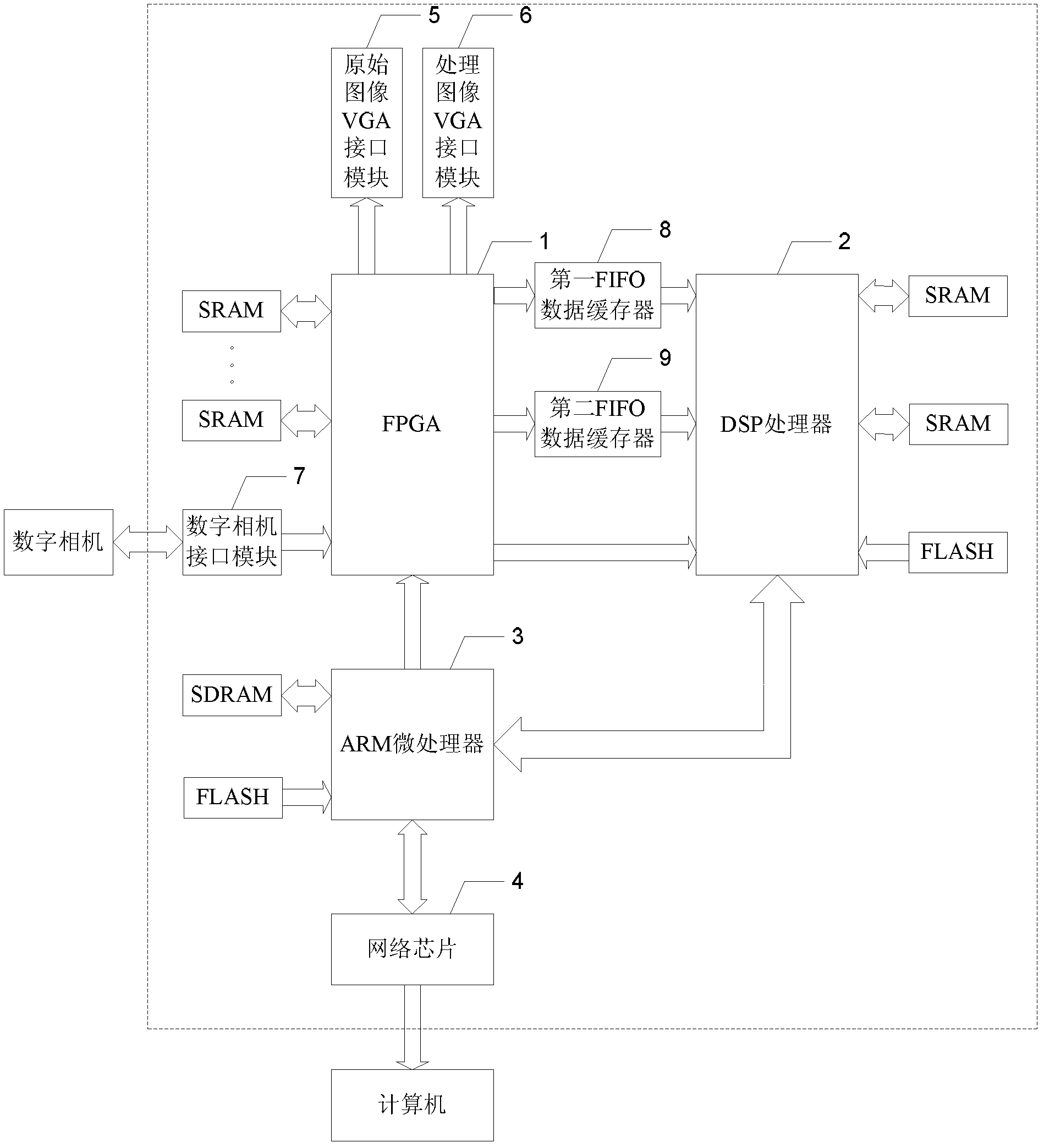
[0022] Specific implementation mode one: the following combination figure 1 , image 3 and Figure 4 Illustrate this embodiment, a kind of high-speed visual capture device of moving object feature described in this embodiment, it comprises FPGA1, DSP processor 2, ARM microprocessor 3, network chip 4, original image VGA interface module 5, processing image VGA interface Module 6, digital camera interface module 7, first FIFO data buffer 8 and second FIFO data buffer 9,
[0023] Digital camera gathers original image, and is connected with the image input end of FPGA1 by digital camera interface module 7, and the original image display output end of FPGA1 is connected with the input end of original image VGA interface module 5, and the processed image display output end of FPGA1 and processing The input end of the image VGA interface module 6 is connected, the first cache output end of FPGA1 is connected with the input end of the first FIFO data buffer 8, the output end of the ...
specific Embodiment approach 2
[0025]Specific implementation mode two: this implementation mode further explains implementation mode one, it also includes multi-chip SRAM, two slices of FLASH and one slice of SDRAM,
[0026] FPGA1 is provided with multiple storage input and output terminals, and each storage input and output terminal of FPGA1 is connected to the input and output terminals of a slice of SRAM;
[0027] The DSP processor 2 is provided with two storage input and output terminals, each storage input and output terminal of the DSP processor 2 is connected with the input and output terminals of a SRAM, and the cache input terminal of the DSP processor 2 is connected with the output terminal of the FLASH;
[0028] The storage input and output terminals of the ARM microprocessor 3 are connected with the input and output terminals of the SDRAM, and the cache input terminals of the ARM microprocessor 3 are connected with the output terminals of the FLASH.
[0029] Using the hardware structure of FPGA+...
specific Embodiment approach 3
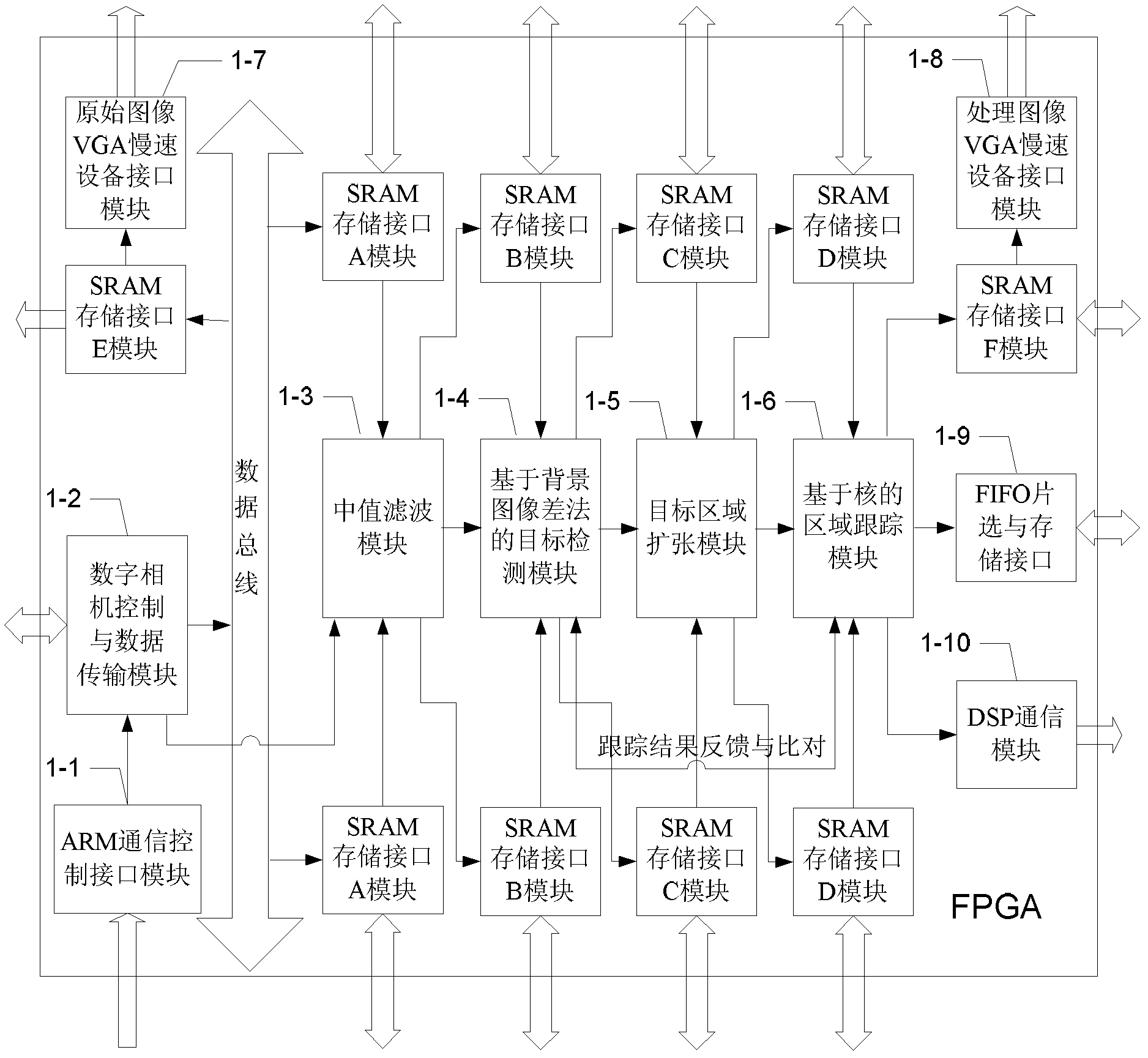
[0069] Specific implementation mode three: according to the following figure 2 Describe this embodiment, this embodiment further limits Embodiment 1 and 2, FPGA1 includes ARM communication control interface module 1-1, digital camera control and data transmission module 1-2, median filter module 1-3, based on the background Target detection module 1-4 of image difference method, target area expansion module 1-5, kernel-based area tracking module 1-6, original image VGA slow device interface module 1-7, processed image VGA slow device interface module 1 -8. FIFO chip selection and storage interface 1-9 and DSP communication module 1-10,
[0070]The control signal input end of the ARM communication control interface module 1-1 is connected with the control signal output end of the ARM microprocessor 3, and the control signal output end of the ARM communication control interface module 1-1 is connected with the digital camera control and data transmission module 1-2. The contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More