

Spray gun track planning method for free-form surface spraying robot
A spraying robot and trajectory planning technology, applied in the field of robotics, can solve the problems of unfavorable robot automation, long trajectory planning process, and long calculation time, and achieve the effects of shortened planning time, high accuracy, and convenient modification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
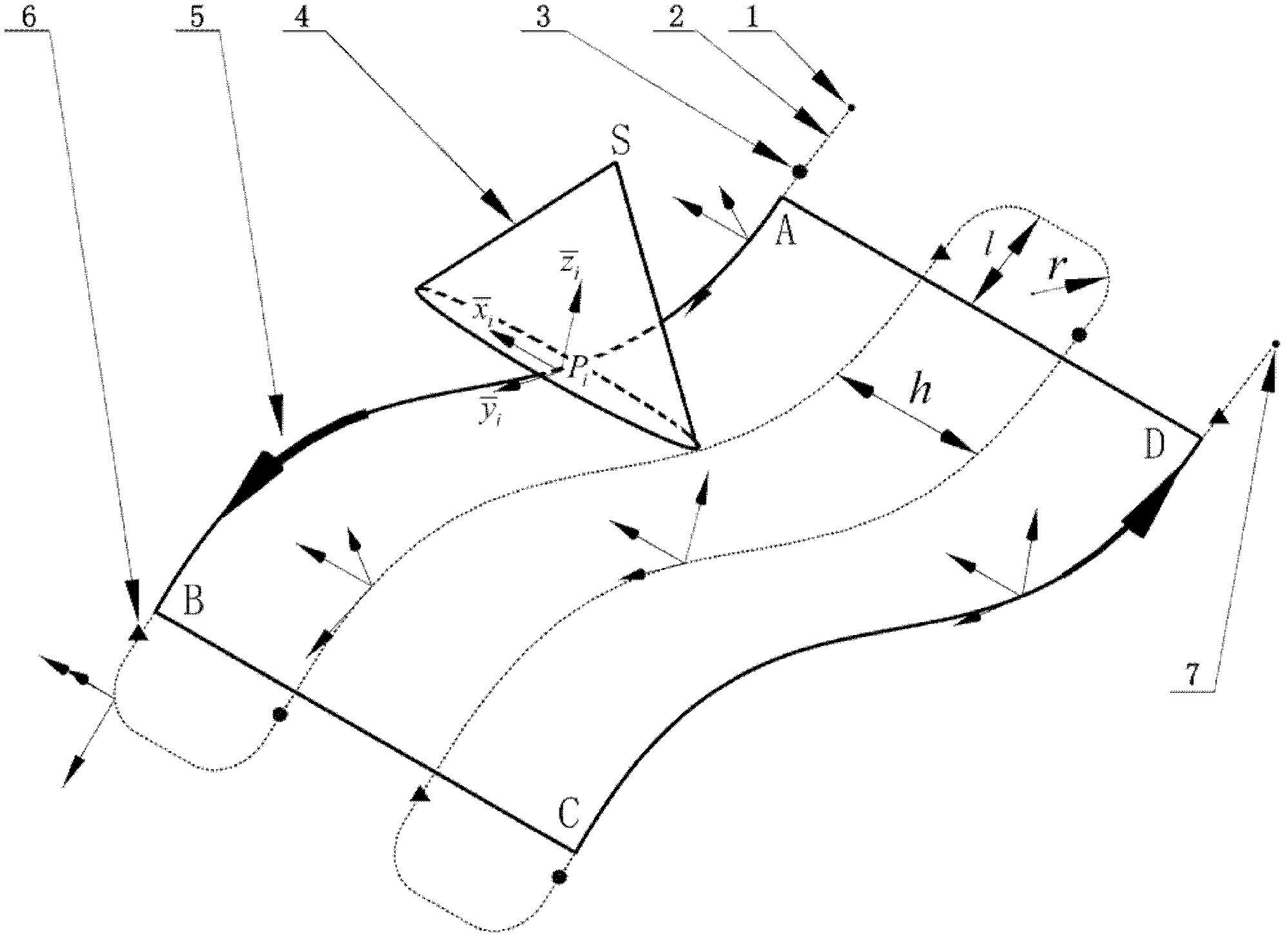
[0025] Usually, when the spraying robot is working, the spraying path is composed of a series of equidistant path lines. It is required that the axis of the spray gun is always perpendicular to the surface of the workpiece and maintain a constant spraying distance from the surface of the workpiece. The spray gun carries the spray cone to reciprocate along the spraying path. If the whole of the spray gun and the spray cone is regarded as the tool in CNC machining, and the center of the bottom of the spray cone is regarded as the tool tip, the movement of the spray gun is very similar to the movement of the tool in CNC machining. The difference between tool motion and spray gun motion is that, from the perspective of degrees of freedom, in five-axis CNC machining, the tool can rotate around the tool axis vector, and the other five degrees of freedom are limited; in order to meet the requirements of the spraying process, the spray gun All six degrees of freedom are constrained. I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More