Method for determining control parameters of servo controller for electro-hydraulic linear displacement servo system
A servo controller and servo system technology, applied in the field of electro-hydraulic servo system, can solve the problems that the performance of linear displacement servo cannot meet engineering requirements, the debugging of electro-hydraulic linear displacement servo system is time-consuming and laborious, and the control parameters of servo controller are blindly determined. Achieve the effect of improving static and dynamic performance, reducing blindness, and high dynamic tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] In order to deepen the understanding of the present invention, the following combination figure 1 , 2, 3 and 4 further describe the present invention in detail, and this embodiment is only used to explain the present invention, and does not constitute a limitation to the protection scope of the present invention.
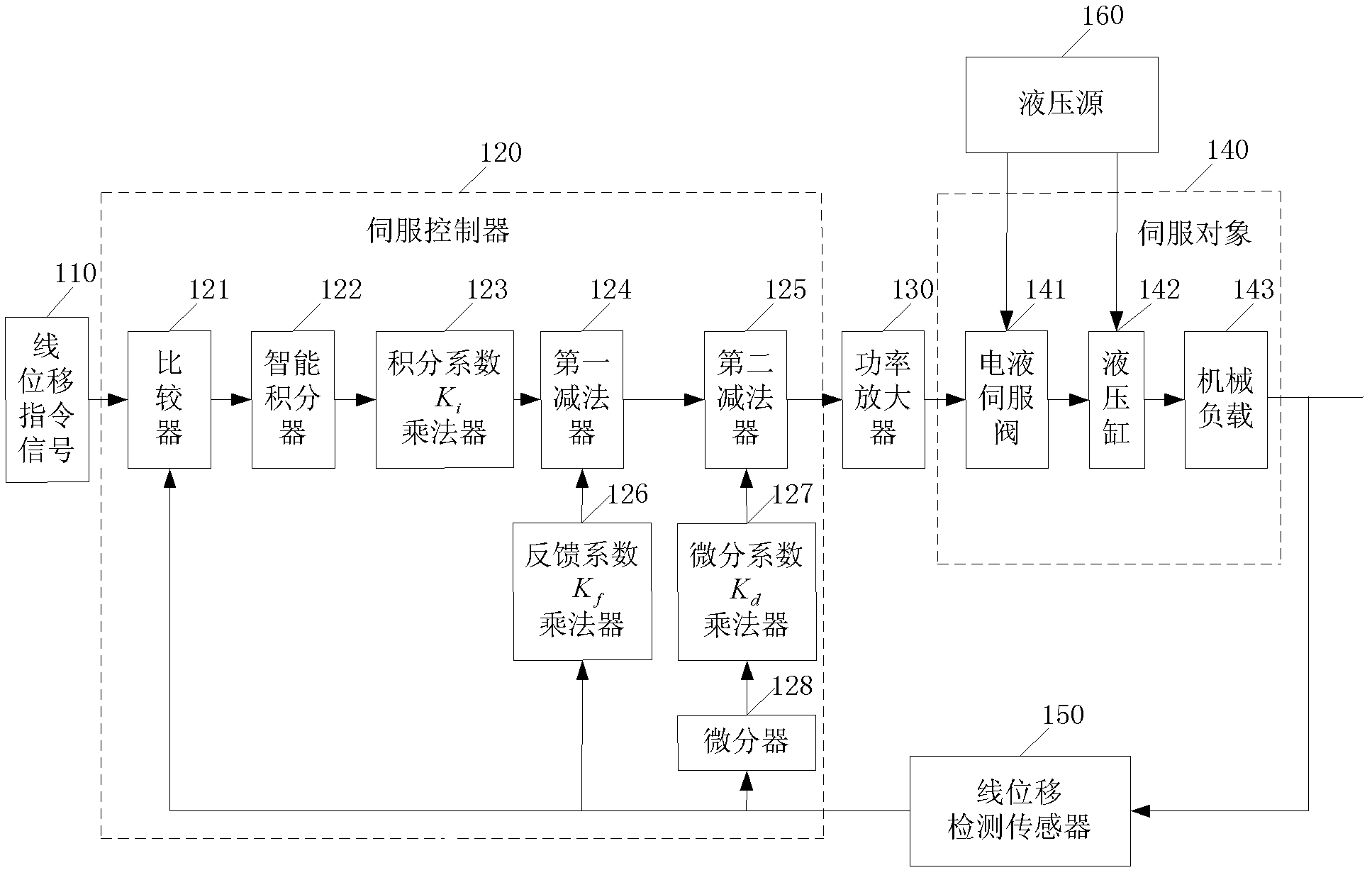
[0037] figure 1 It is a block diagram of the electro-hydraulic line displacement servo system according to the embodiment of the present invention. The electro-hydraulic line displacement servo system is composed of a line displacement command signal generator 110, a servo controller 120, a power amplifier 130, a servo object 140, a line displacement detection sensor 150 and a hydraulic source 160; the servo controller 120 is composed of a comparator 121 , intelligent integrator 122, integral coefficient K i Multiplier 123, first subtractor 124, second subtractor 125, feedback coefficient K f Multiplier 126, differential coefficient K d Multiplier 127 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com