

AGV (Automatic Guided Vehicle) for multiple-wheel train heavy load mobile robot
A mobile robot and multi-wheel train technology, applied in the field of intelligent logistics handling and transportation vehicles, can solve the problems of increased chassis height, reduced stability, and increased power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
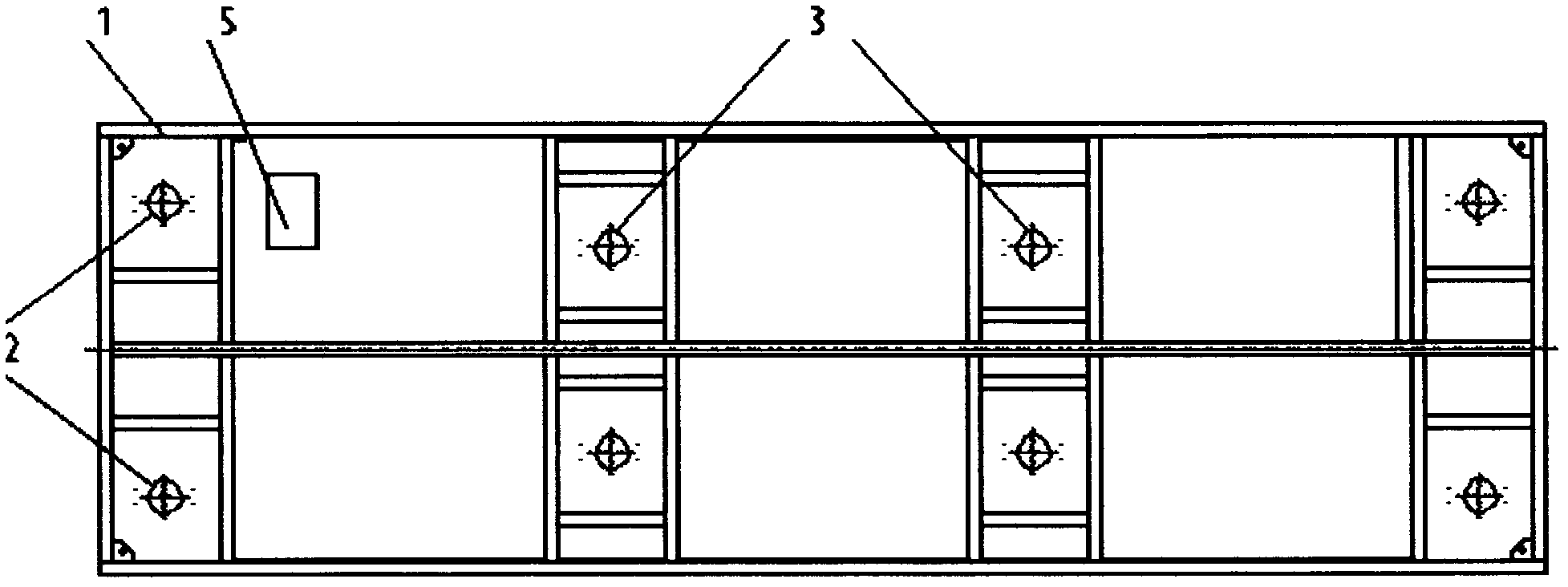
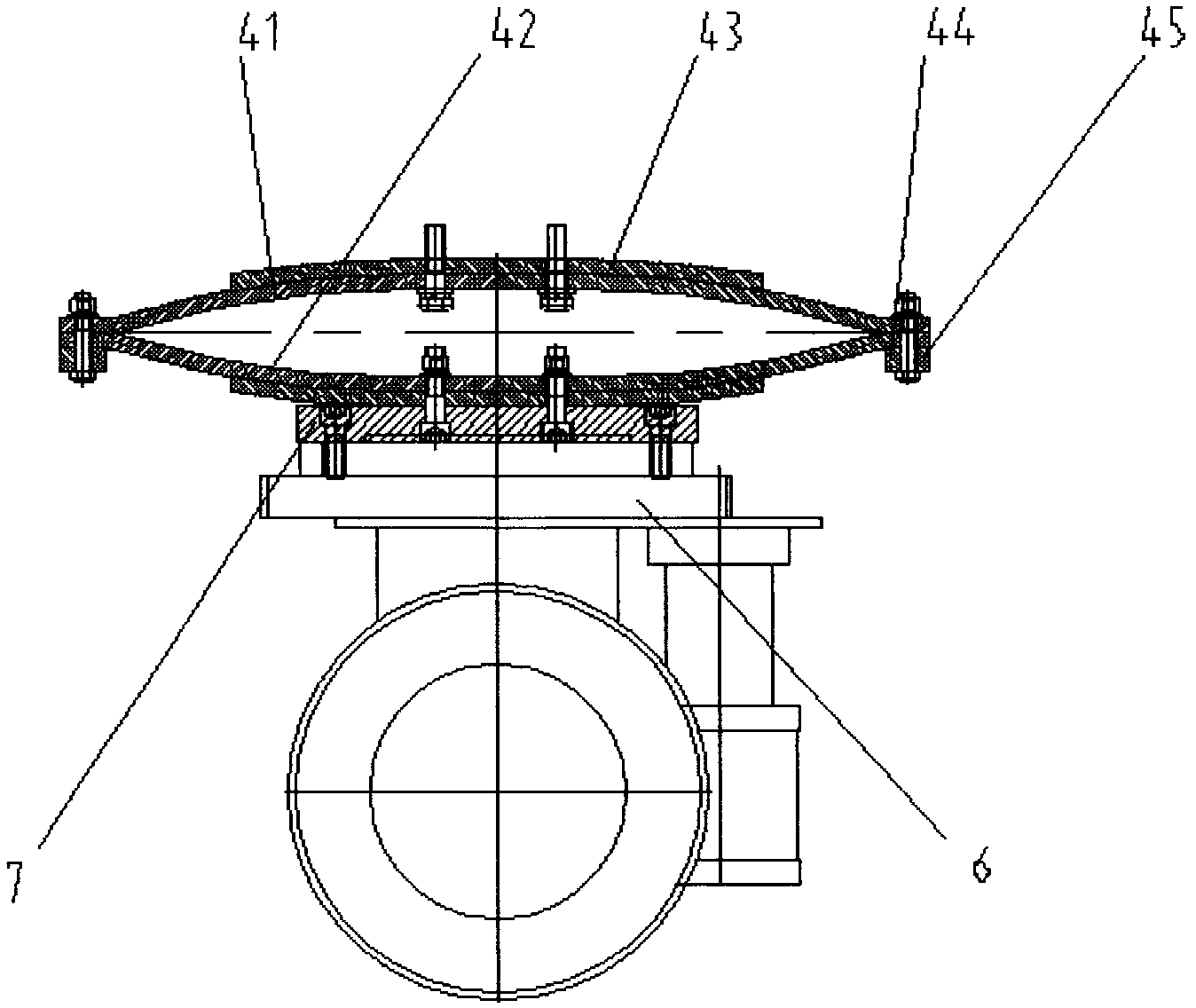
[0021] The present invention is implemented in the following manner: the structure of the heavy-duty AGV car is as follows figure 1 and 2 As shown, there is a floating spring structure frame 4 installed between the vehicle frame 1 and each wheel, and the wheels are divided into driving wheels and supporting wheels, and the driving and steering of the driving wheels are controlled by the electronic control device 5 to control the driving device and the steering device. Realization, including speed synchronization and direction synchronization, the support wheel is a universal wheel, no power, only supports and balances, and walks with it; different numbers of driving wheels 2 and support wheels 3 can be put in according to the load tonnage. The driving device drives the AGV to walk. The driving wheel can be equipped with a steering device or not. The driving wheel with steering is called a "steering wheel". Only one steering wheel can realize the walking and steering of the car...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More