Vehicle braking energy recovery system
A technology of energy recovery and vehicle braking, which is applied in the direction of brakes, vehicle components, brake transmissions, etc., can solve the problems of high cost, high manufacturing process requirements, complex structure, etc., to ensure stability and extend driving mileage , The effect of recovering braking energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
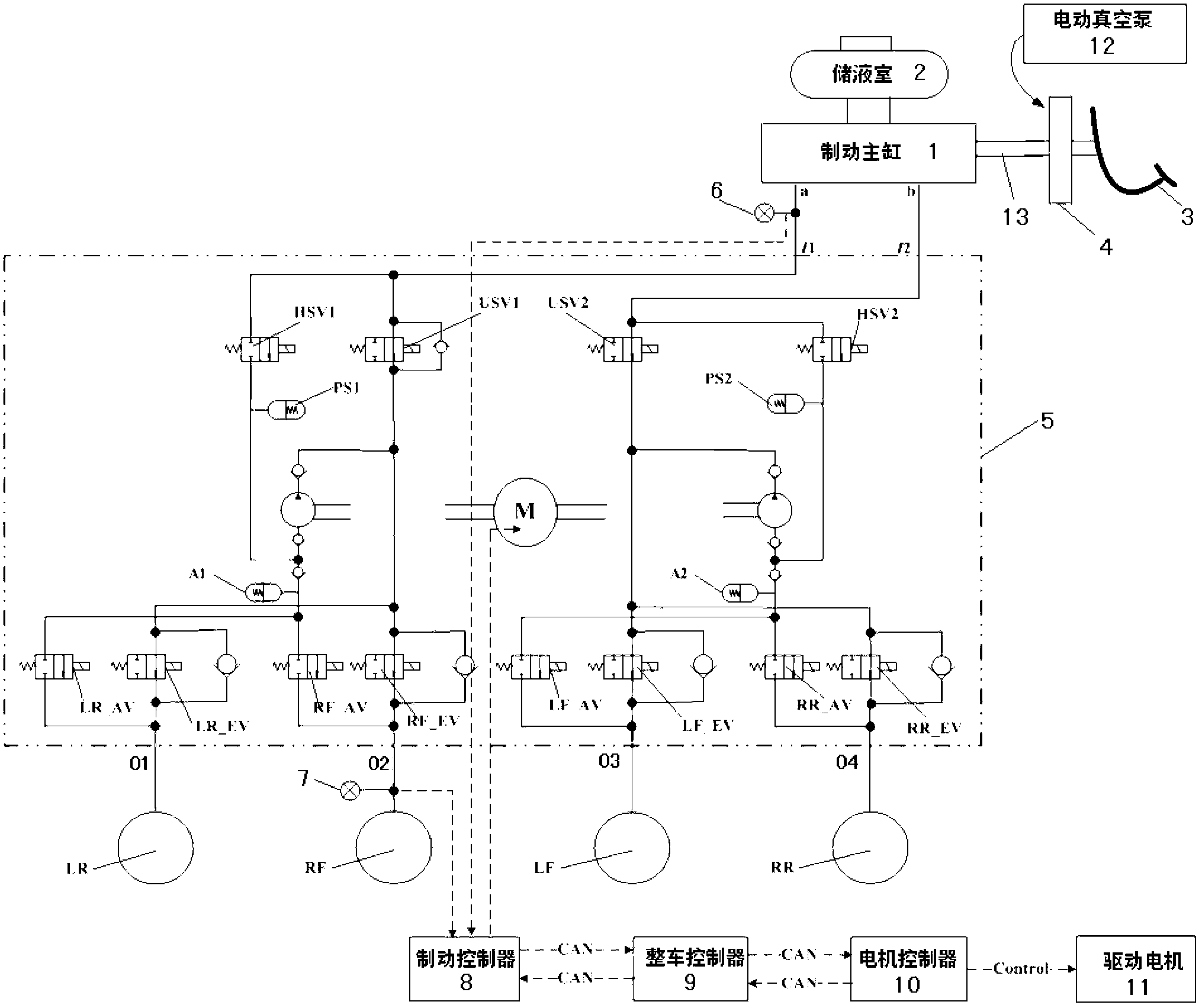
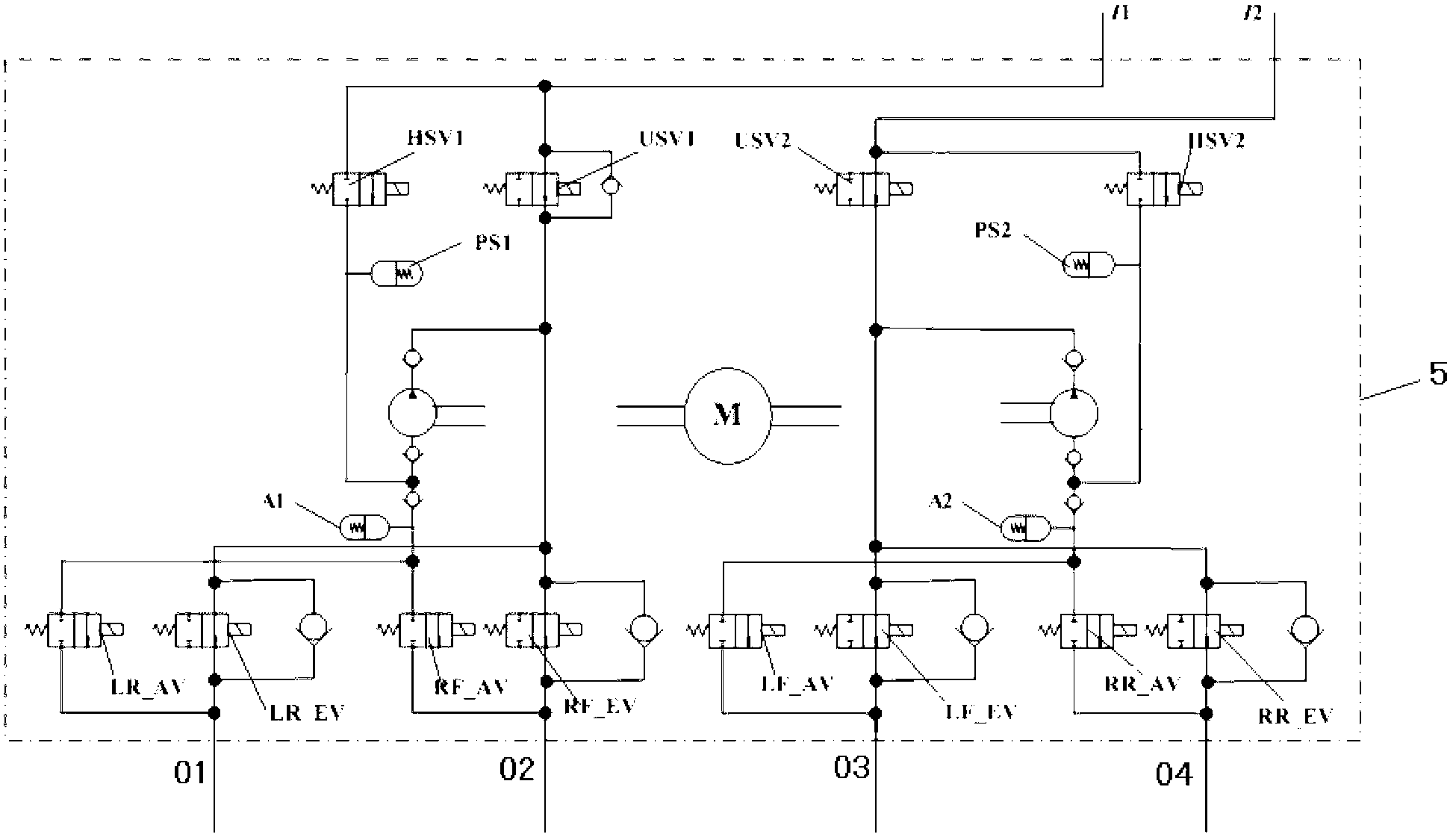
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0014] Such as figure 1 , figure 2 As shown, the present invention is improved on the basis of the existing vehicle traditional hydraulic braking system and the hydraulic unit of the vehicle stability control system. The vehicle traditional hydraulic braking system includes a brake master cylinder 1, a liquid storage chamber 2, a brake Pedal 3, vacuum booster 4 and four wheel brake cylinders LR, RF, LF, RR; vehicle stability control system hydraulic unit includes right front-left rear brake oil circuit and left front-right rear brake oil circuit, Each brake oil circuit is equipped with main circuit solenoid valves USV1, USV2, bypass solenoid valves HSV1, HSV2, oil inlet and outlet solenoid valves for each wheel, oil pump, oil pump motor and low-pressure accumulator, right front-left rear brake oil Road and the left front-right rear brake oil circui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More