

Precise polishing robot system for large-caliber complex optical lenses
A robotic system, optical mirror technology, applied in optical surface grinders, grinding machine parts, grinding/polishing equipment, etc., can solve the problems of low integration, large footprint, inflexibility, etc., to improve processing efficiency , Small footprint, high integration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
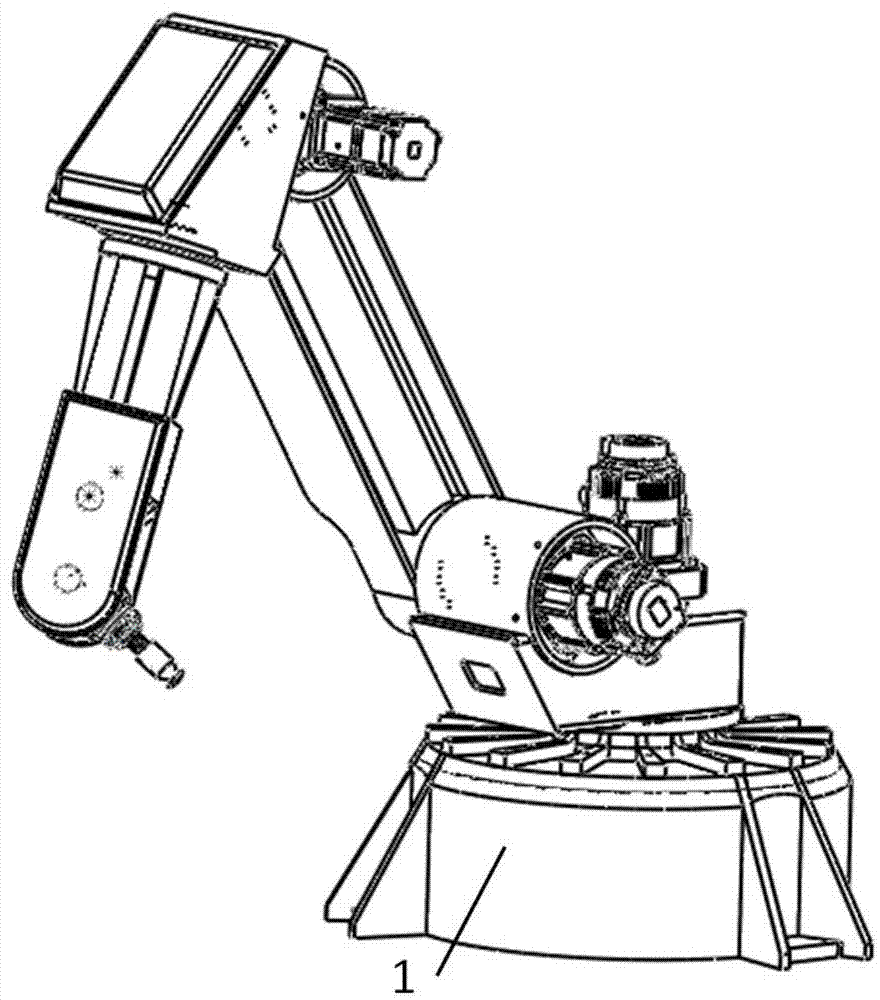
[0025] Such as figure 1 As shown, this embodiment includes a polishing robot 1 .
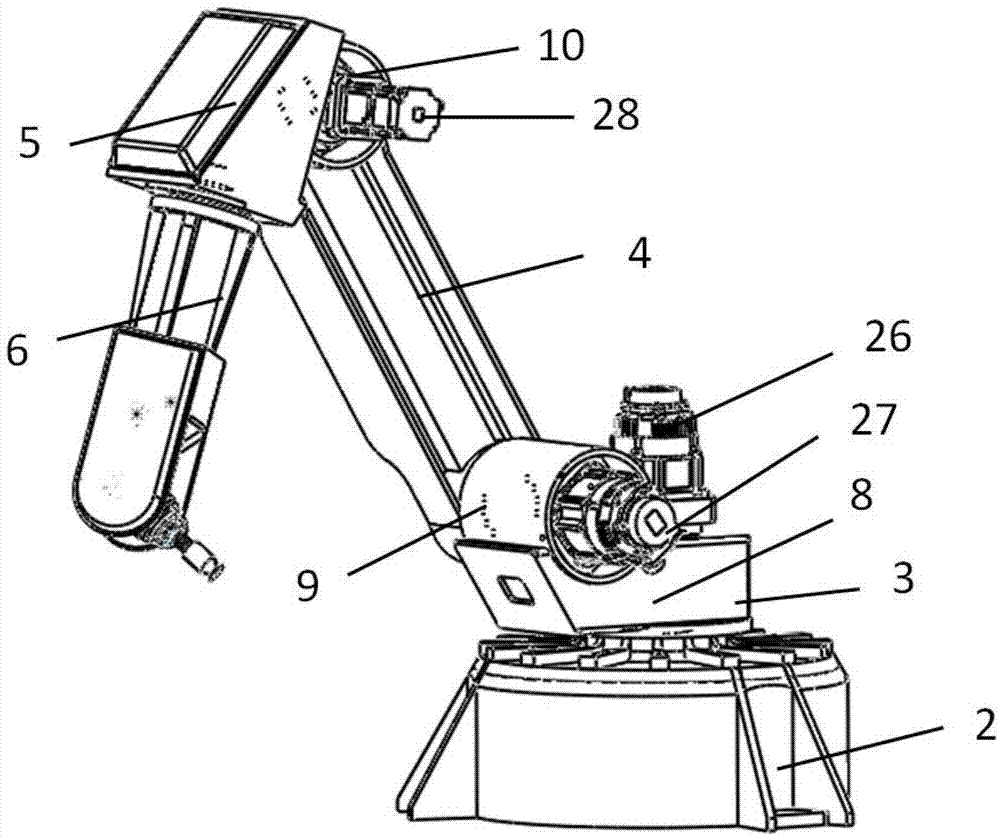
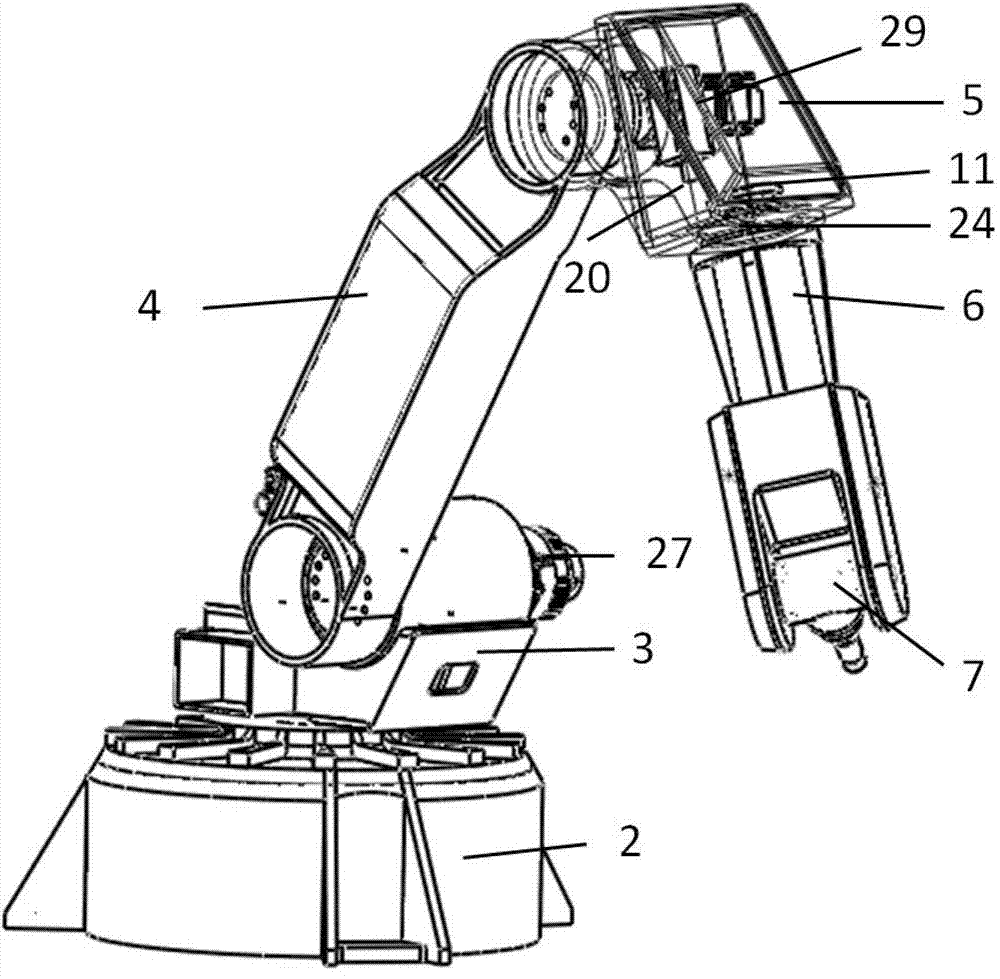
[0026] Such as Figure 2 to Figure 6 As shown, the polishing robot includes: base 2, turntable 3, upper arm 4, upper joint 5, forearm 6, wrist 7, first to third RV reducers 8-10, first to third harmonic deceleration Devices 11-13, first to fourth bearings 14-17, first bevel gear 18, second bevel gear 19, first to third synchronous pulley sets 20-22, wrist shaft 23, forearm input shaft 24, The polishing input shaft 25, the first to sixth servo motors 26-31, the polishing rotating shaf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More