Wind power generation apparatus
A technology for wind power generation devices and generators, which is applied to wind turbine components, wind energy power generation, wind turbines, etc., can solve the problem that it is difficult to reduce torque fluctuations, and achieve the effect of reducing mechanical loads.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach )
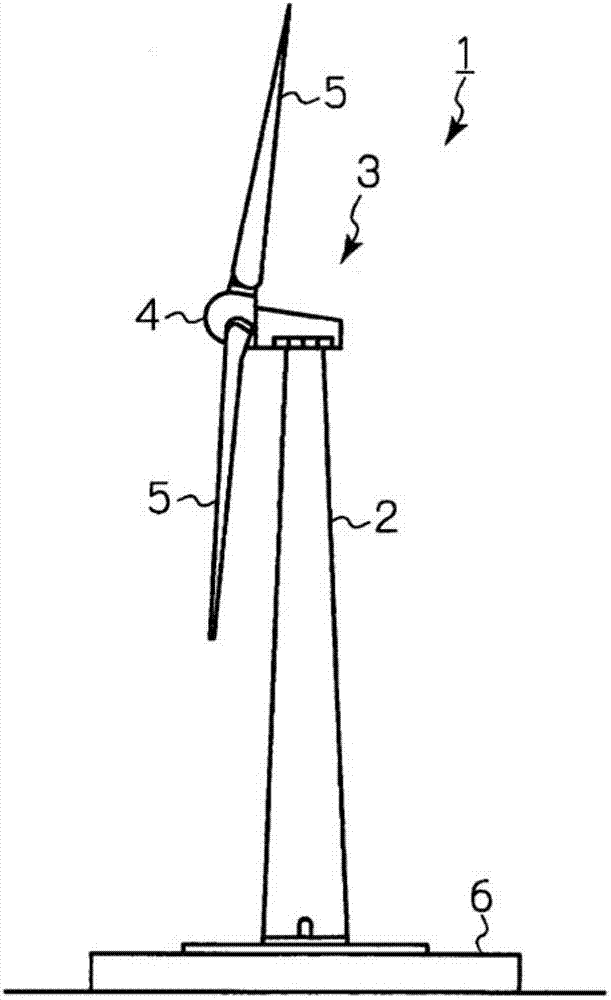
[0035] figure 1 It is a side view of the wind power generator 1 according to the first embodiment. The wind power generator 1 includes a strut 2 erected on a base 6 , a nacelle 3 provided on the upper end of the strut 2 , and a rotor head 4 rotatably assembled with respect to the nacelle 3 . A plurality of (for example, three) windmill blades (also called windmill wings) 5 are installed on the rotor head 4 . The wind power generator 1 is a so-called constant speed wind turbine, and is configured such that after the rotation speed of the wind turbine blades 5 reaches a predetermined rated rotation speed, the wind turbine blades 5 rotate at the rated rotation speed.
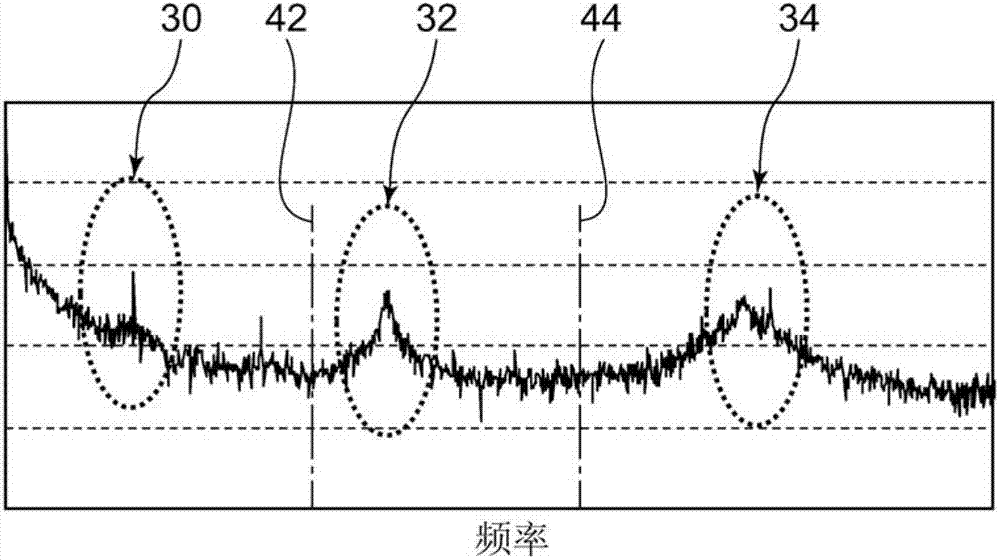
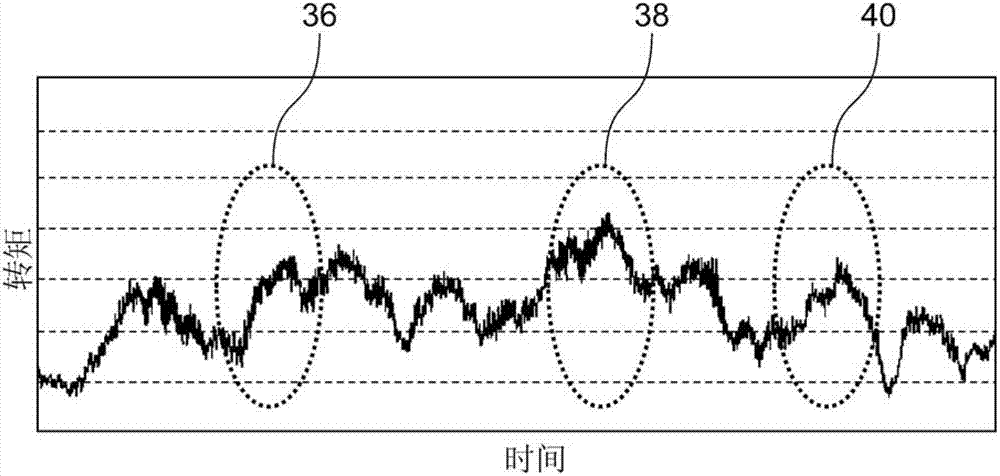
[0036] FIGS. 2( a ) and ( b ) are diagrams showing variations in torque generated by wind turbine blade 5 receiving wind. Figure 2(a) is the frequency spectrum of the torque, and Figure 2(b) is the time series data of the torque. By analyzing the torque data represented by FIGS. 2( a ) and ( b ), the present inv...
no. 2 Embodiment approach )
[0090] In the first embodiment, the case where the wind power generator 1 is a wind turbine operated at a constant speed has been described. The wind power generator according to the second embodiment is a so-called variable-speed operation wind turbine, and is configured such that the rotation speed of the wind turbine blade 5 changes due to wind speed or the like during normal operation.
[0091] Figure 9 It is a graph showing the relationship between the natural vibration frequency of the power transmission system and the rigidity of the torque arm obtained by a simulation test. Such as Figure 9 As shown, the natural vibration frequency of the power transmission system largely depends on the rigidity of the torque arm. Therefore, by changing the rigidity of the torque arm, the natural vibration frequency can be controlled more precisely.
[0092] Figure 10 is an exemplary Campbell diagram for torque in a wind power plant. Figure 10 Especially the picture about the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



