

Data fusion system and method of differential GPS (Global Position System) and inertial navigation in intelligent vehicle
An inertial navigation system and data fusion technology, applied in the field of automobile control, to achieve the effect of ensuring reasonable operation and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
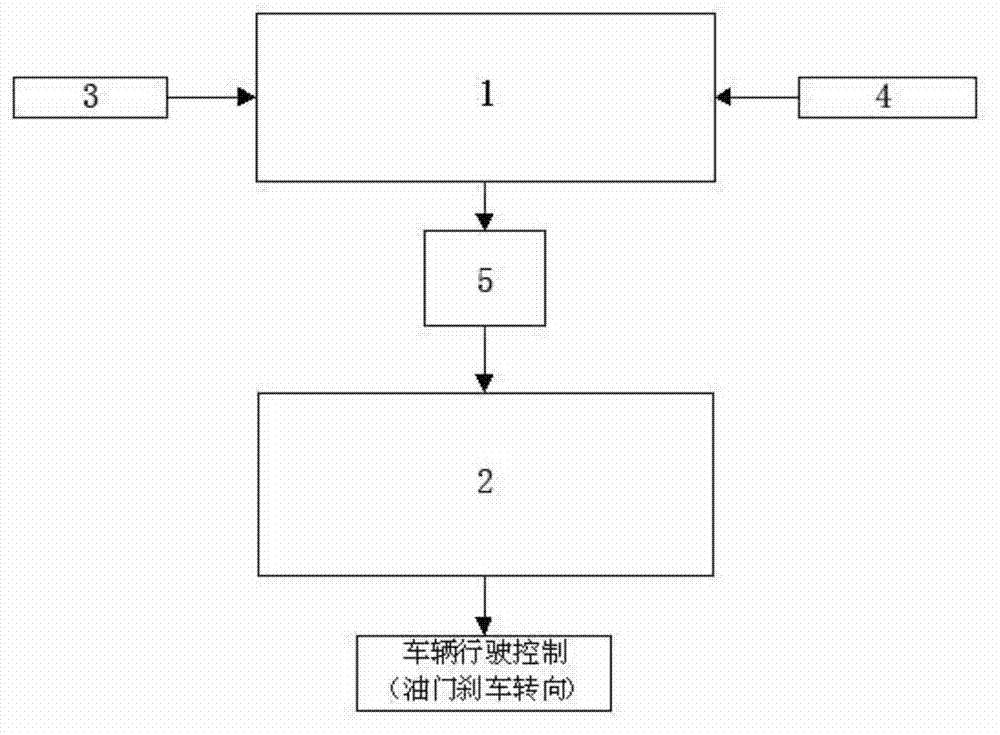
[0030] Such as Figure 1-5 As shown, the system and method for the fusion of differential GPS and inertial navigation data in a smart vehicle of the present invention are composed of upper computers 1, 2, a differential GPS3, and an inertial navigation system composed of two notebook computers equipped with VS2008 programs. 4 and a network router 5.
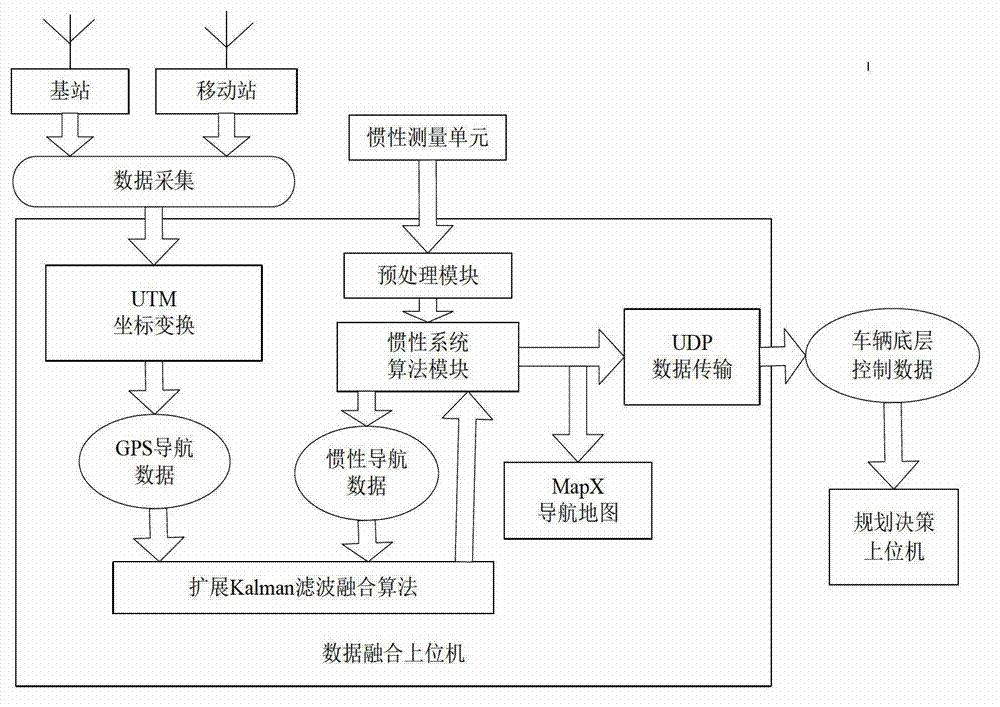
[0031] The differential GPS3 obtains the GPS data packet corrected by the base station station through the space satellite signal and transmits it to the data fusion host computer 1 through the serial port transmission method; the inertial navigation system 4 collects the driving status information of the intelligent vehicle and transmits it to the data fusion host computer 1 through the serial port; the data fusion The upper computer 1 extracts the information of speed, course and position in the GPS data packet according to the NEMA-0183 protocol and performs coordinate transformation to the earth coordinate system, and simulta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More