

Dexterous three-finger hand of fruit picking robot
A technology for picking robots and dexterous hands, applied in picking machines, manipulators, program-controlled manipulators, etc., can solve the problems of poor flexibility, single function, poor fruit shape adaptability, etc., and achieve convenient maintenance, flexible operation, easy processing and assembly Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
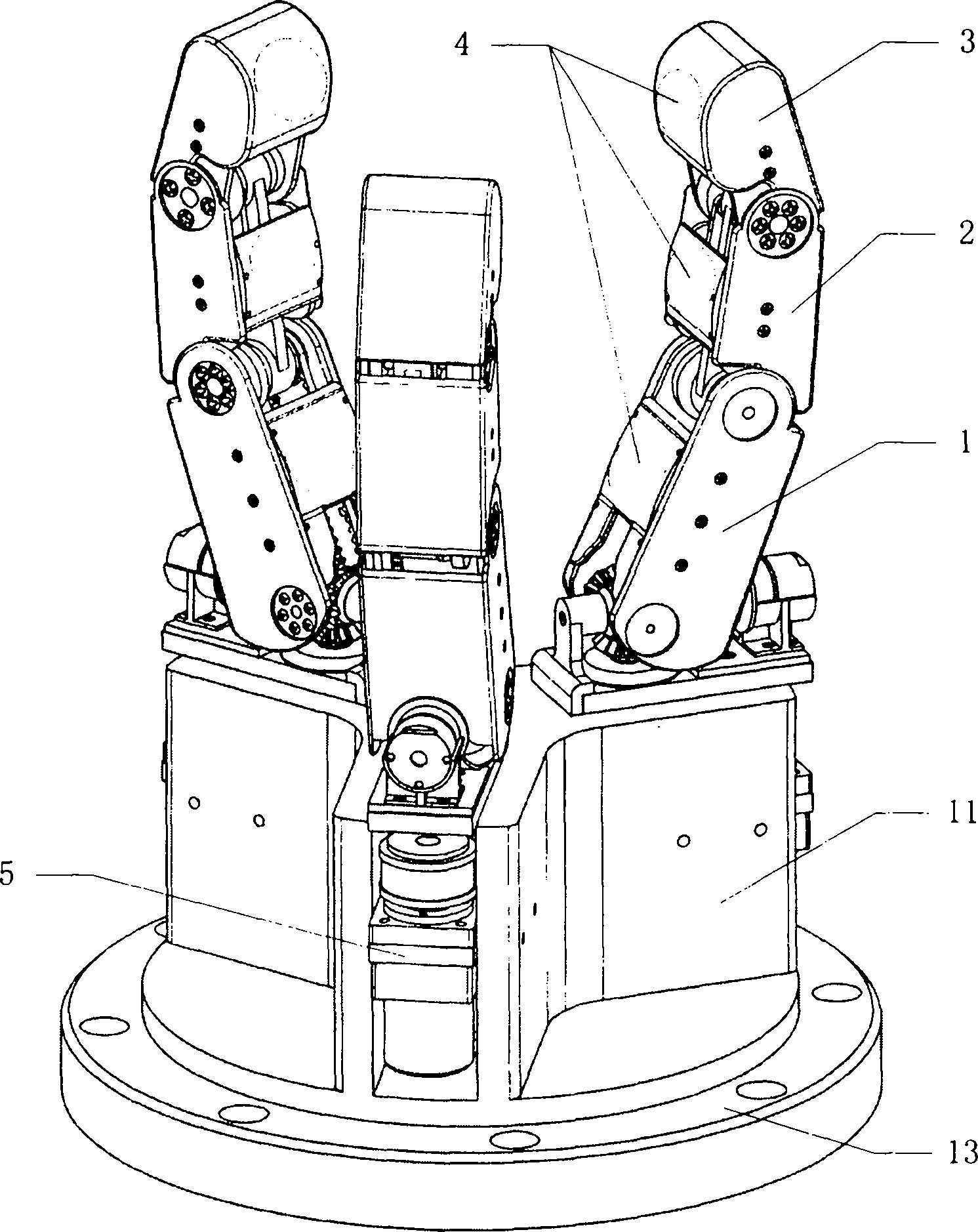
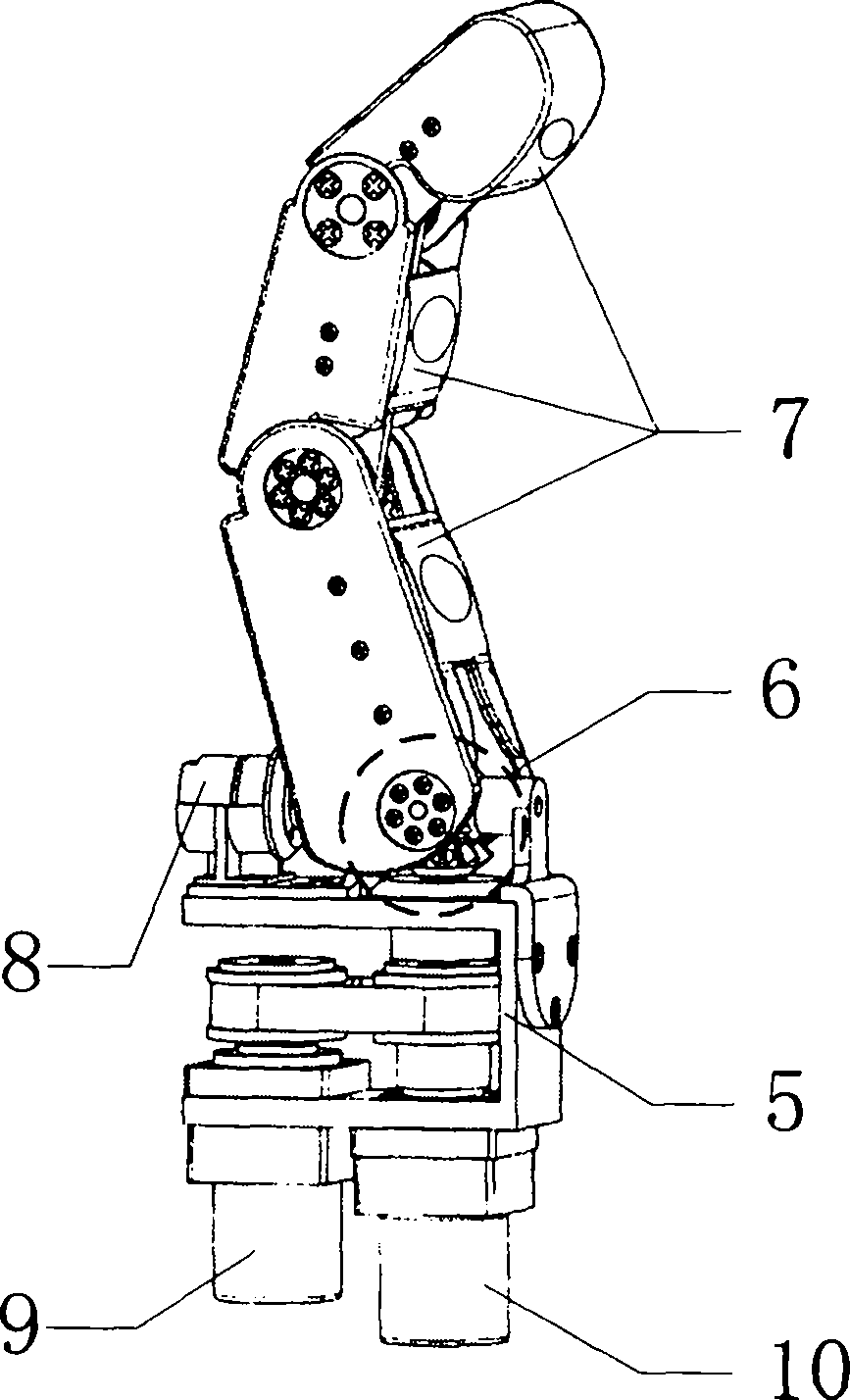
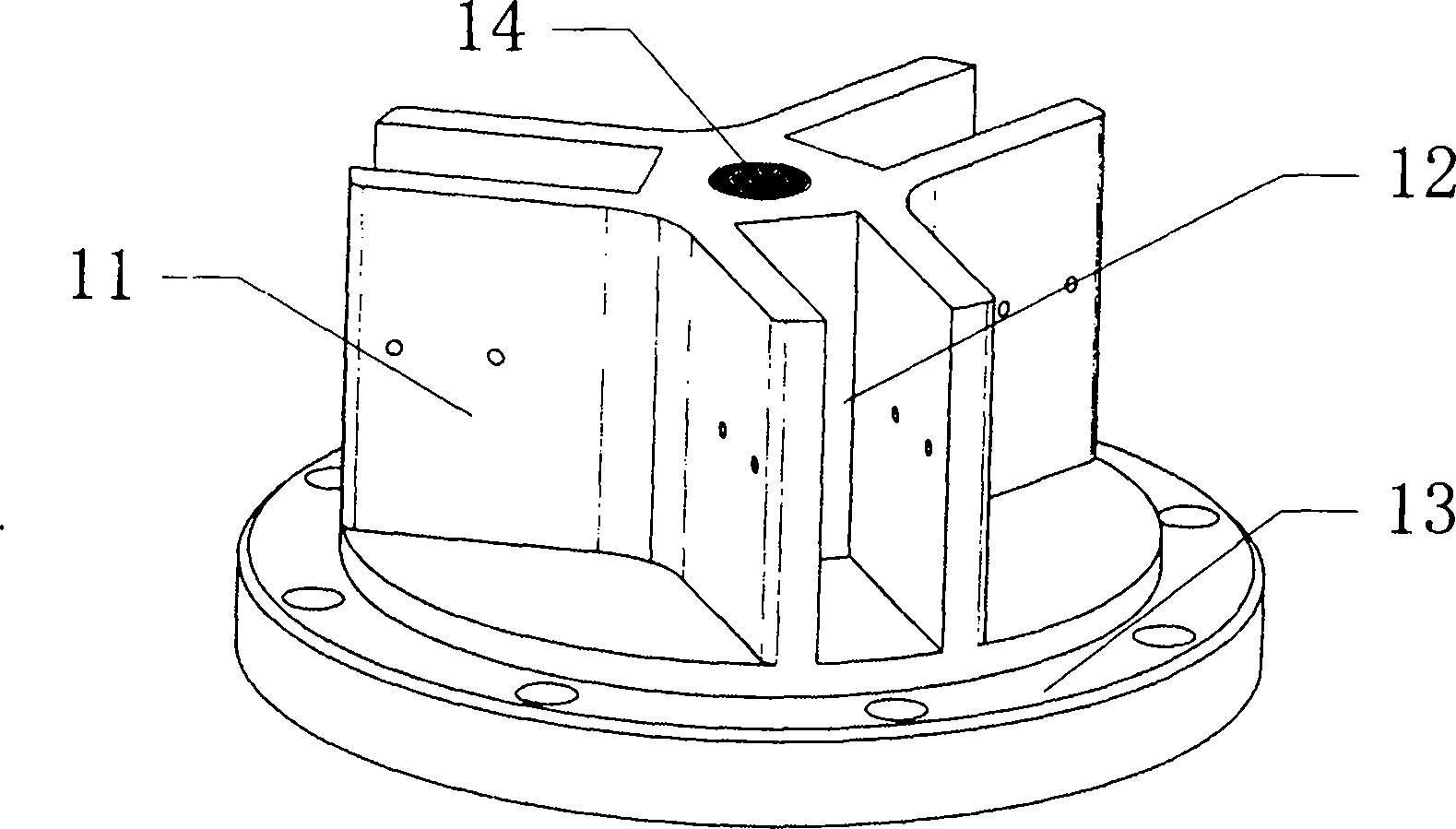
[0019] Specific implementation mode one: see figure 1 , figure 2 with image 3 As shown, the three-finger dexterous hand of the fruit picking robot described in this embodiment includes modular fingers, a palm, a sensor module, and a control module; the dexterous hand is composed of three fingers, and each finger adopts a modular design idea, which is anthropomorphic. The finger structure and degree of freedom; the modular finger is composed of the base joint (6), the first knuckle (1), the middle knuckle (2) and the end knuckle (3), each of the finger pads (7) All are equipped with rubber gaskets to reduce the damage to the fruit. The three motors that drive the finger joints are all fixedly mounted on the base joint support (5); the palm (11) is evenly distributed along the circumference with 3 mounting slots ( 12), the mounting groove is evenly distributed along the circumference of the palm at 120°, the base joint bracket (5) of the finger is fixed in the mounting groove (1...
specific Embodiment approach 2
[0020] Specific implementation manner two: see figure 1 , figure 2 , image 3 with Figure 4 As shown, the sensor module of this embodiment includes an ultrasonic sensor (14) and a pressure sensor (4). The ultrasonic sensor (14) is installed in the circumferential hole in the center of the palm, and the pressure sensor (4) is installed on the first knuckle. , The middle knuckle and the finger pads (7) of the end knuckle; the control module includes a sensor signal receiving module, a signal processor, an I\O interface, a motor drive unit and a controller. The signal processor passes the sensor signal The receiving module receives the distance signal detected by the ultrasonic sensor (14). When the distance reaches a suitable grasping distance, the signal processor drives the servo motor to move through the controller to realize the simultaneous action of three fingers and grasp the fruit. At the same time, pressure The sensor (4) feeds back the detected pressure value to the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More