

Networked servomotor control method based on disturbance observer
A technology of disturbance observer and networked control, applied in motor generator control, electronic commutation motor control, control system, etc., can solve the problem of ignoring the time delay from the sensor to the controller, not considering the unknown interference of the system, and limiting practical applications, etc. to improve interoperability and flexibility, compensate for network-induced delay, and improve steady-state performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments, but this embodiment is based on the technical solution of the present invention and is not intended to limit the present invention.
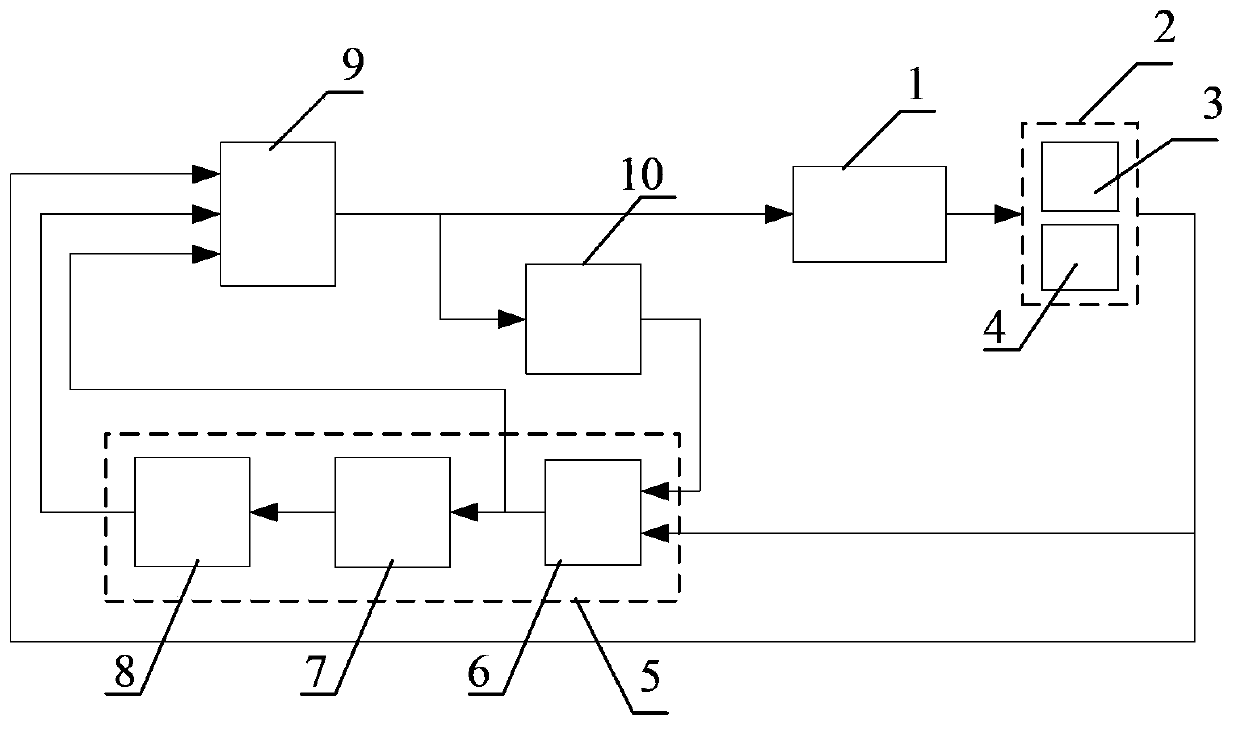
[0017] Such as figure 1 As shown, the servo motor network control system based on the disturbance observer of the present invention includes a measuring element 2, a disturbance observer 5, a sliding mode controller 9 and a control quantity buffer 10.
[0018] Since the network control system is essentially a discrete-time system, first integrate within a sampling period T to obtain the discrete equation of the system:
[0019] x k + 1 = Φ x k + Γ 0 u k + Γ 1 u k - 1 + Γ ξ k y k = C x k
[0020] Where: x∈R n Is the state vector, u∈R is the input vector, y∈R is the output vector, Φ=e AT , A, B and C are continuous system coeffic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More