

A Method for Suppressing Specified Subharmonic Current of Multiphase Induction Motor
A technology for induction motors and current suppression, which is applied in motor control, motor generator control, electronic commutation motor control, etc., and can solve problems such as application limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
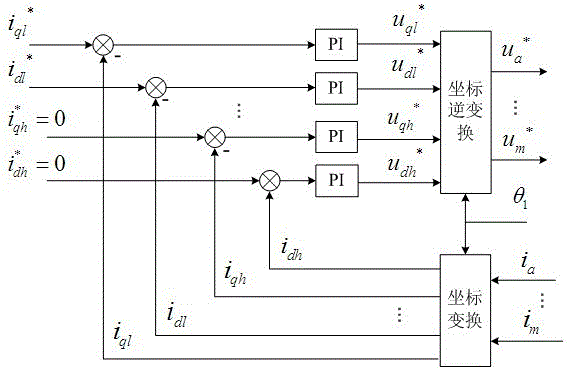
[0038] Embodiment 1: as figure 1 , 2Shown is a basic embodiment of the invention. A method for suppressing a specified harmonic current of a polyphase induction motor, comprising the following steps:
[0039] A. Current reference value processing: Rotor flux orientation vector control based on multi-phase induction motor multi-synchronous rotating coordinate system, according to the motor speed ω r and rotor flux linkage ψ r Proportional-integral adjustment results determine the ratio and phase relationship of the motor fundamental wave and available sub-harmonic currents, extract the current excitation components in their respective synchronous rotating coordinate systems to produce the desired flux density waveform, and obtain the fundamental wave and available sub-harmonic currents in their respective synchronous The reference value of the dq component of the rotating coordinate system And let the dq component reference value of the specified harmful sub-harmonic curre...
Embodiment 2
[0043] Embodiment 2: is the further embodiment of embodiment 1. The difference from Embodiment 1 is that the multi-phase and multi-synchronous rotating coordinate transformation in the step B is to realize the coordinate transformation from the multi-phase static coordinate system to the multi-synchronous rotating coordinate system according to the matrix T:
[0044] [i dl i ql …i dn i qn ] T =T (n+1)×m [i a i b …i m ] T
[0045] The matrix T is as follows:
[0046]
[0047] Among them, n is the highest order of the specified harmful harmonic, m is the number of phases, ζ=2π / m, is the angle between each phase, θ 1 is the phase angle between the fundamental rotor flux vector and the a-phase axis of the stationary coordinate system, θ 3 =3θ 1 , θ 5 =5θ 1 ,...=...,θ n =nθ 1 .
[0048] The inverse transformation of the multiphase and multisynchronous rotating coordinates in the step D is the inverse matrix T of the matrix T -1 Realize coordinate transformatio...
Embodiment 3
[0059] Embodiment 3: is a preferred embodiment of the present invention. Multi-phase induction motor is a five-phase sinusoidal open-winding power supply induction motor. The fundamental wave current realizes electromechanical energy conversion, and the third harmonic current does not produce electromechanical energy conversion, so it is the object of suppression. The method for suppressing the specified sub-harmonic current of a multi-phase induction motor in this embodiment includes the following steps:
[0060] A. Current reference value processing: based on the rotor flux oriented vector control of the fundamental synchronous rotating coordinate system of the five-phase induction motor, according to the motor speed ω r and rotor flux linkage ψ r Proportional-integral adjustment results, determine the reference value of the dq component of the motor fundamental wave in its synchronous rotating coordinate system And make the dq component reference value of the specified t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More