

An EMG Signal Recognition Method Based on Complexity, Fractal Dimension and Fractal Length
An electromyographic signal and recognition method technology, applied in the field of pattern recognition, can solve problems such as the need to further improve the real-time accuracy of multi-motion pattern recognition, and the unsatisfactory practicability of multi-motion pattern electromyography control research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operating procedures.
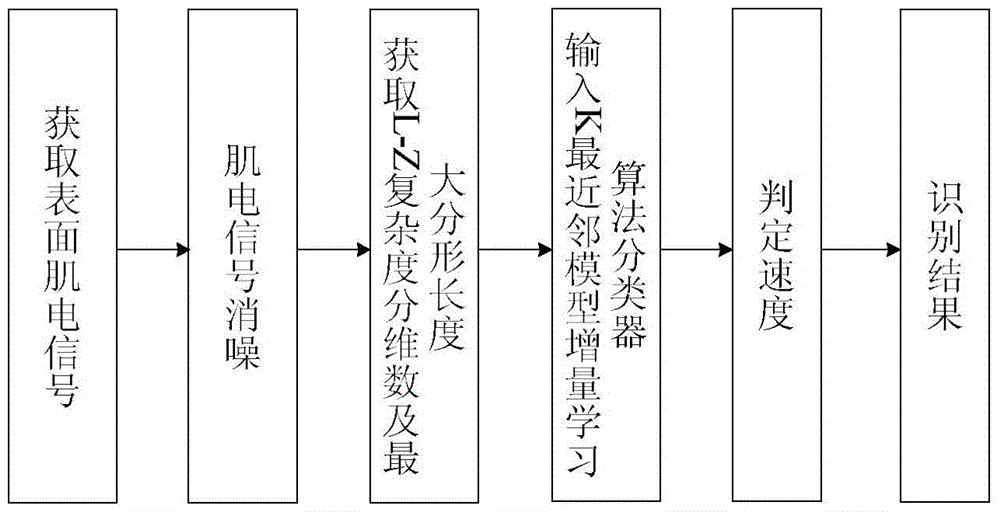
[0050] Such as figure 1 As shown, this embodiment includes the following steps:
[0051] Step 1: Obtain the sample data of the human upper limb EMG signal, specifically: firstly pick up the human upper limb EMG signal through the EMG signal acquisition instrument, and then use the signal denoising method based on wavelet energy spectrum entropy to denoise the EMG signal containing interference noise noise cancellation.
[0052] (1) Collect the EMG signals of the upper limbs of the human body. The subjects performed 50 groups of clenching, stretching, wrist internal rotation and wrist external rotation respectively. The extensor carpi ulnaris and flexor carpi ulnaris of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More