

Control method of active control type magnetic suspension system free of position sensor
A technology of active control and control method, applied in general control system, control/regulation system, adaptive control, etc., can solve the problems of poor system robustness, achieve good robustness, reduce complexity, and reduce cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
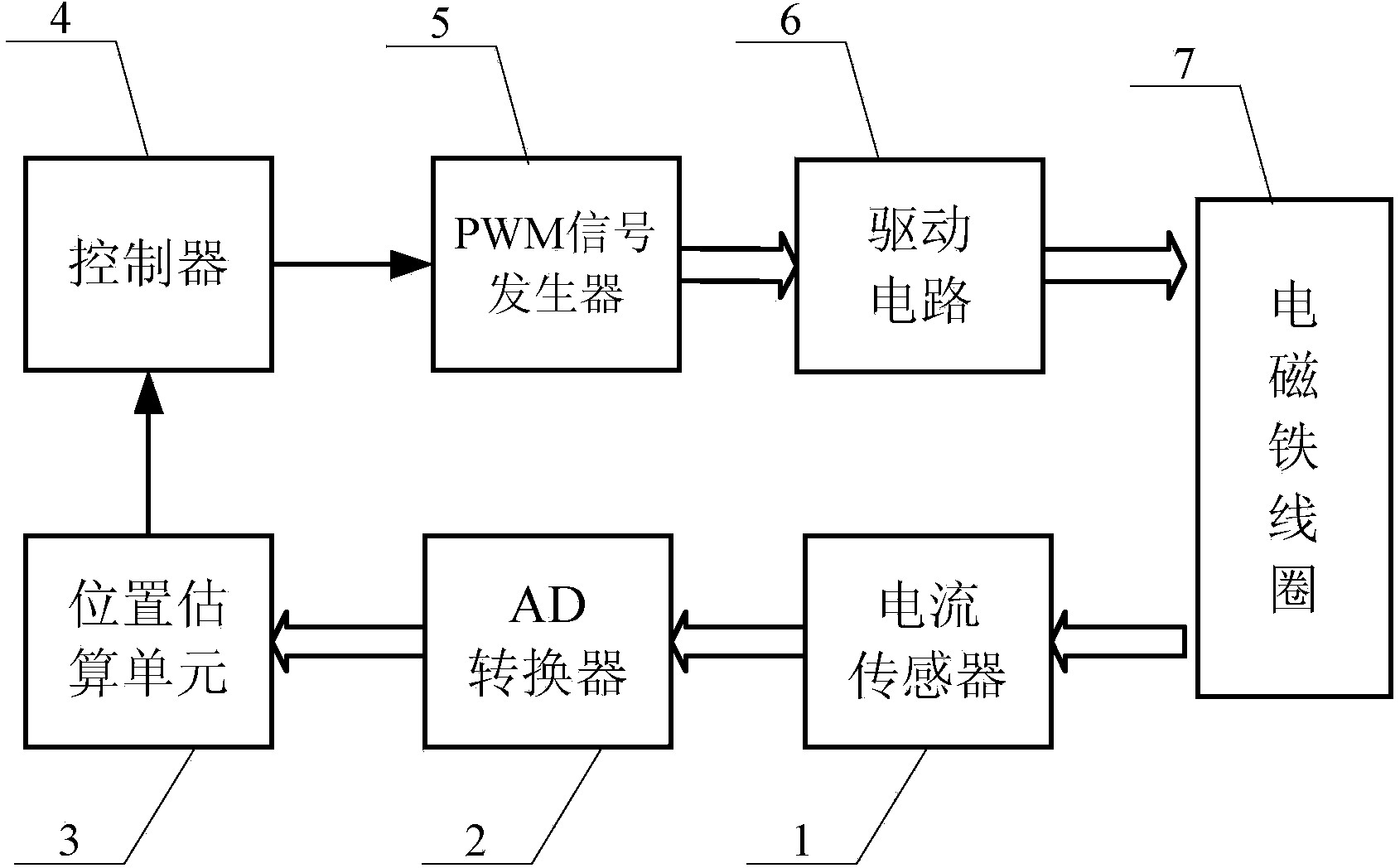
[0042] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the control method of position sensorless active control type magnetic levitation system described in this embodiment, it collects and obtains the electric current of the electromagnet coil 7 of magnetic levitation system by current sensor 1, adopts AD converter 2 to collect the current simulation that obtains The signal is converted into a current digital signal, and the position estimation unit 3 obtains the position signal of the suspended object of the magnetic levitation system through calculation according to the current digital signal, compares the position signal of the suspended object with the preset expected position signal, and obtains a position deviation signal, After the controller 4 processes the position deviation signal, it obtains a control signal to the PWM signal generator 5, and the control signal causes the PWM signal generator 5 to generate a voltage pul...
specific Embodiment approach 2
[0043] Specific implementation mode two: the following combination Figure 1 to Figure 12 Describe this embodiment, this embodiment will further explain Embodiment 1, the position estimation unit 3 in this embodiment obtains the position signal of the suspended object of the magnetic levitation system through calculation according to the current digital signal, and compares the position signal of the suspended object with the preset The specific process of obtaining the position deviation signal is as follows:
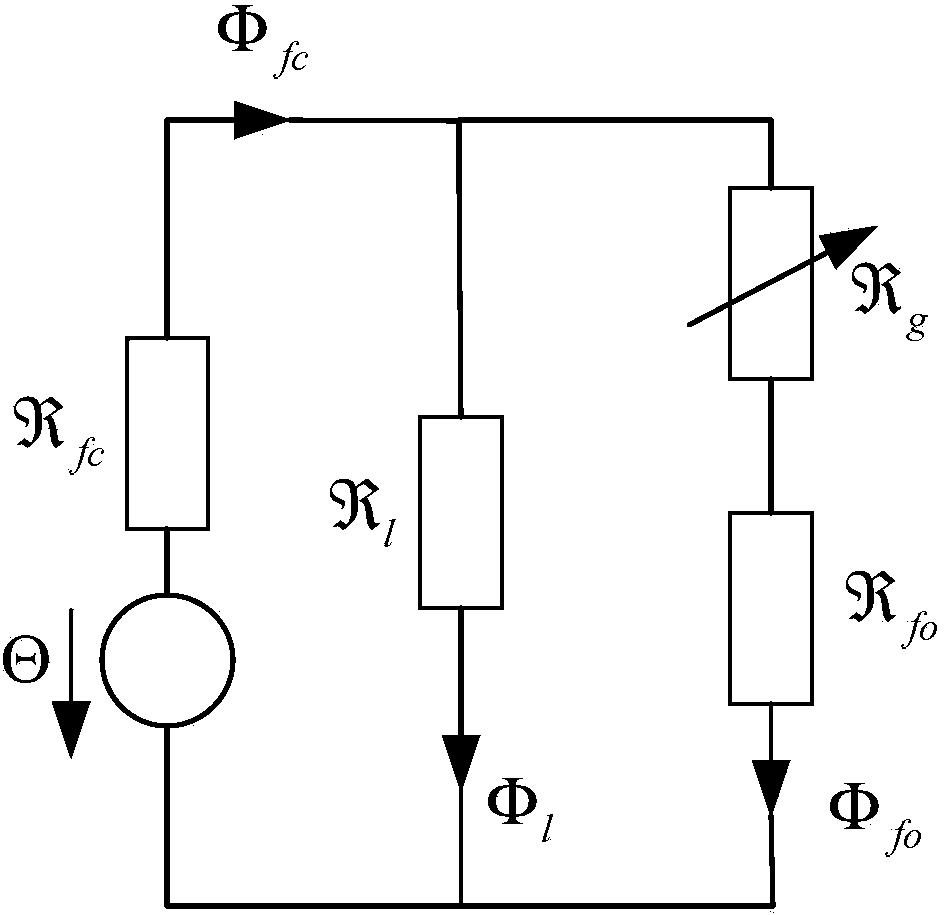
[0044] The electromagnet inductance L of the magnetic levitation system is:
[0045]
[0046] In the formula, N is the number of turns of the electromagnet coil 7, is the equivalent reluctance of the electromagnet system composed of the electromagnet and the electromagnet coil;
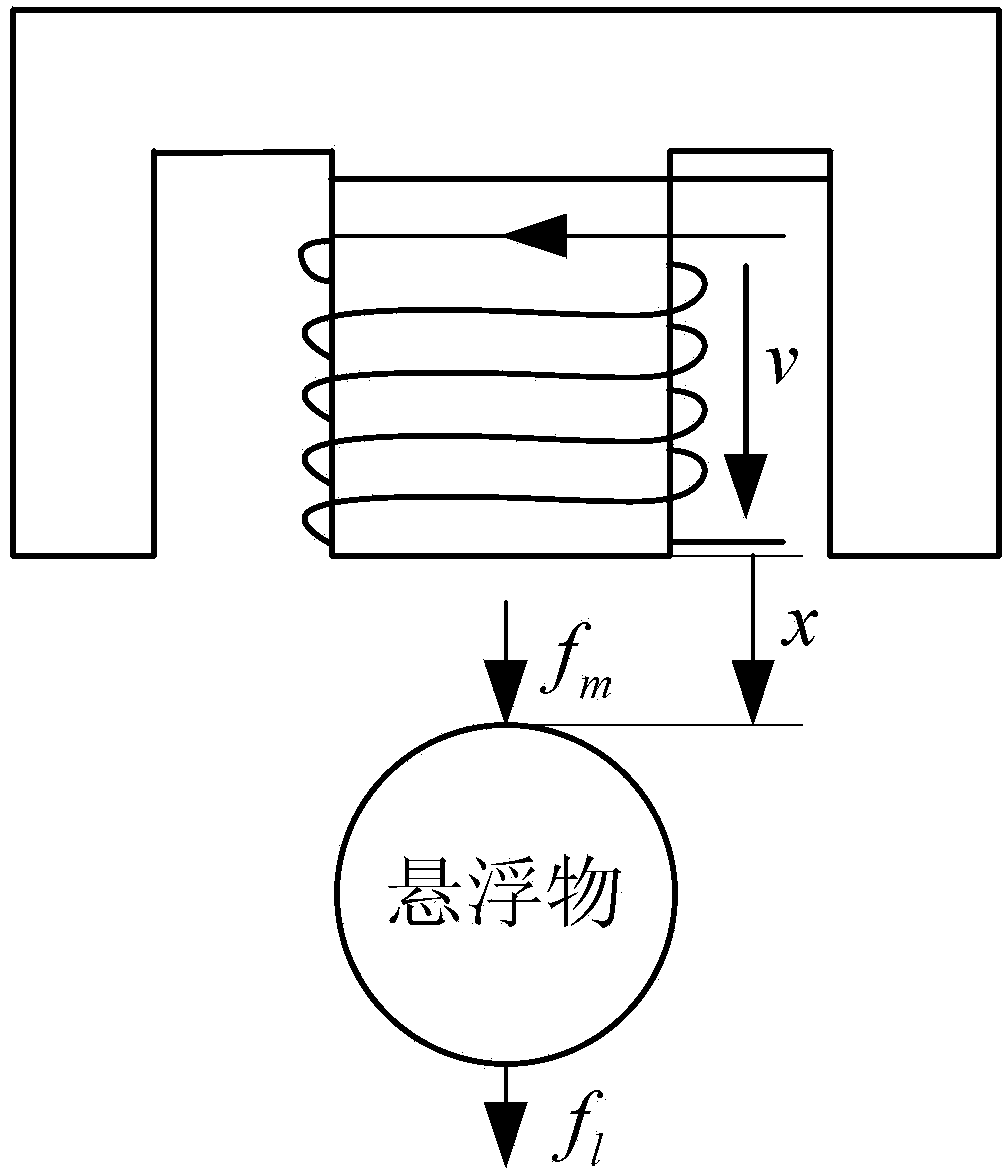
[0047] The electromagnet inductance L is related to the air gap width x between the electromagnet and the suspension. The estimated value of the electromagnet inductance L is obtained thro...
specific Embodiment approach 3
[0058] Specific implementation mode three: the following combination Figure 1 to Figure 12 Describe this embodiment, this embodiment will further explain Embodiment 2, after the controller 4 in this embodiment processes the position deviation signal, the specific process of obtaining the control signal to the PWM signal generator 5 is as follows:
[0059] Controller 4 adopts PID control method, and its transfer function K(s) is:
[0060] K ( s ) = K a ( 1 + T d s ) ( 1 + 1 T i s ) ,
[0061] where K a is the gain term, T d is the differential time constant, T i is the...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Resistance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More