

Pneumatic model-assisted navigation method for four-rotor-wing air vehicle
A quadrotor aircraft, a technology for assisting navigation, applied in navigation calculation tools and other directions, can solve problems such as autonomous speed measurement and inaccurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
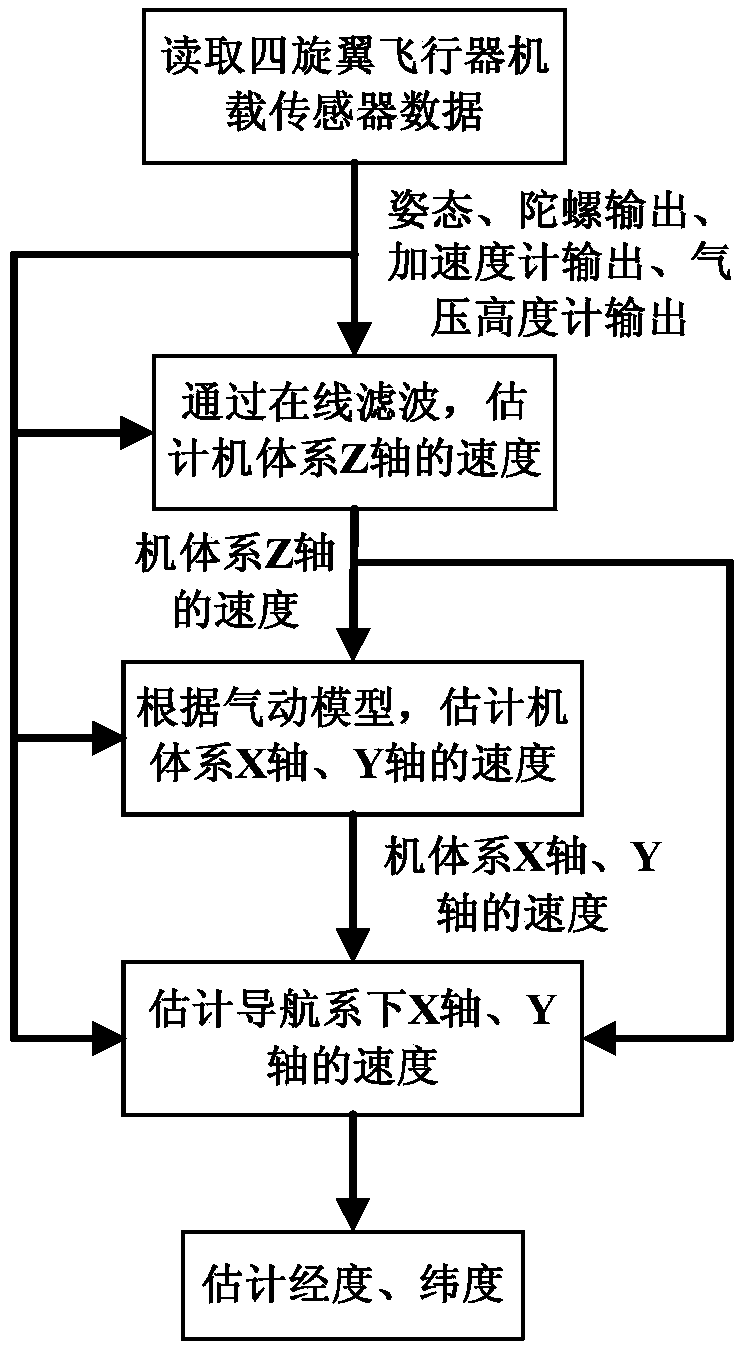
Method used
Image

Examples
Embodiment
[0084] In the form of simulation, the positioning accuracy of the quadrotor aircraft after using the method of the present invention is verified. The airborne sensor accuracy is set as follows: gyro bias stability is 10deg / h, deg / h is degree / hour, accelerometer bias stability is 10-4g, attitude accuracy of heading system is 1deg, barometric altimeter error is 1m. The parameter error of the aerodynamic model of the quadrotor aircraft is set to 5%.
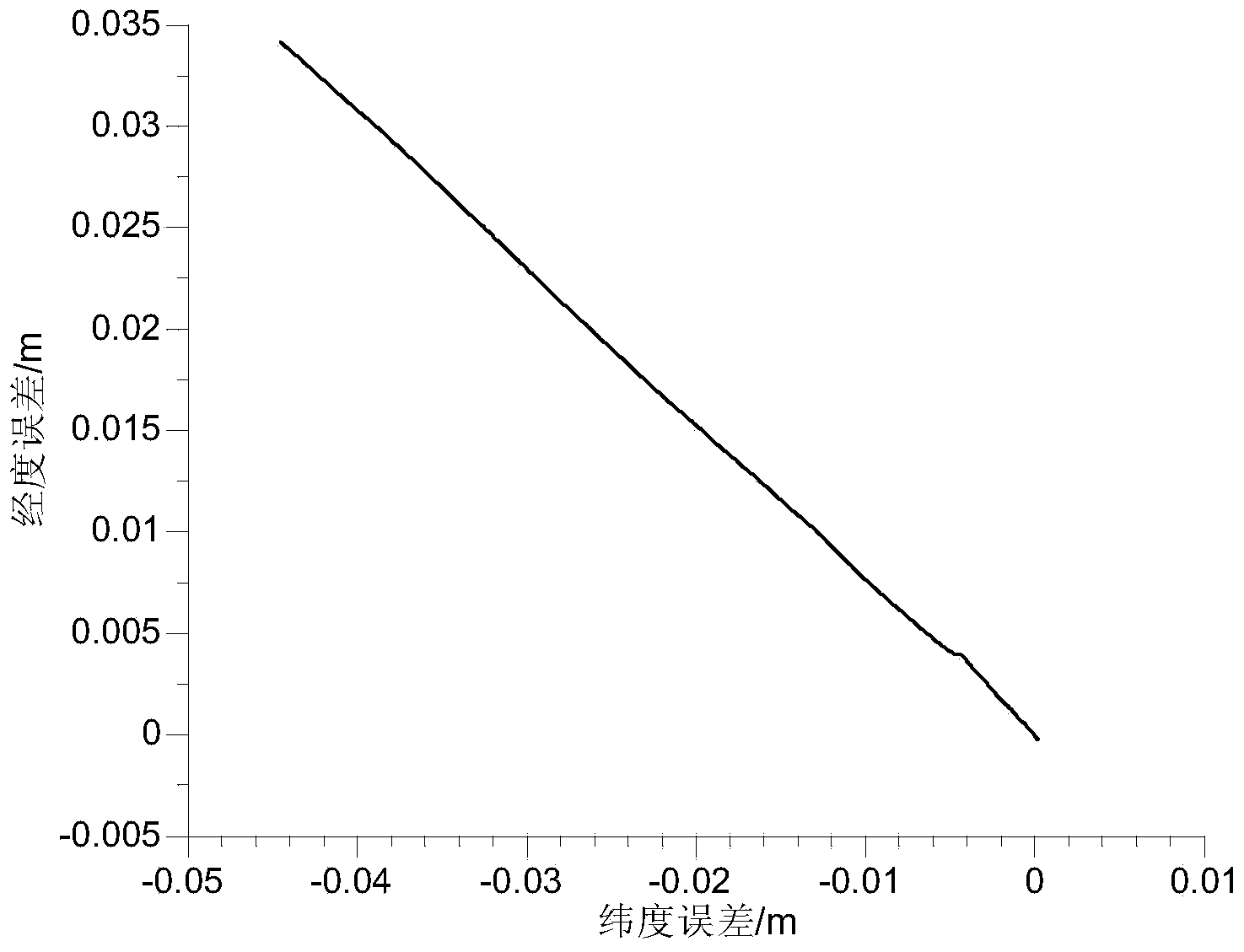
[0085] Let the quadrotor hover for 5 minutes. figure 2 It is the positioning error of the four-rotor aircraft after adopting the method of the present invention within 5 minutes in the hovering state, and it can be seen that the positioning accuracy is within 0.1m. Using the existing method (that is, the pure inertial navigation method), its positioning error is above 100m, and the accuracy of this method has been improved by more than 3 orders of magnitude.
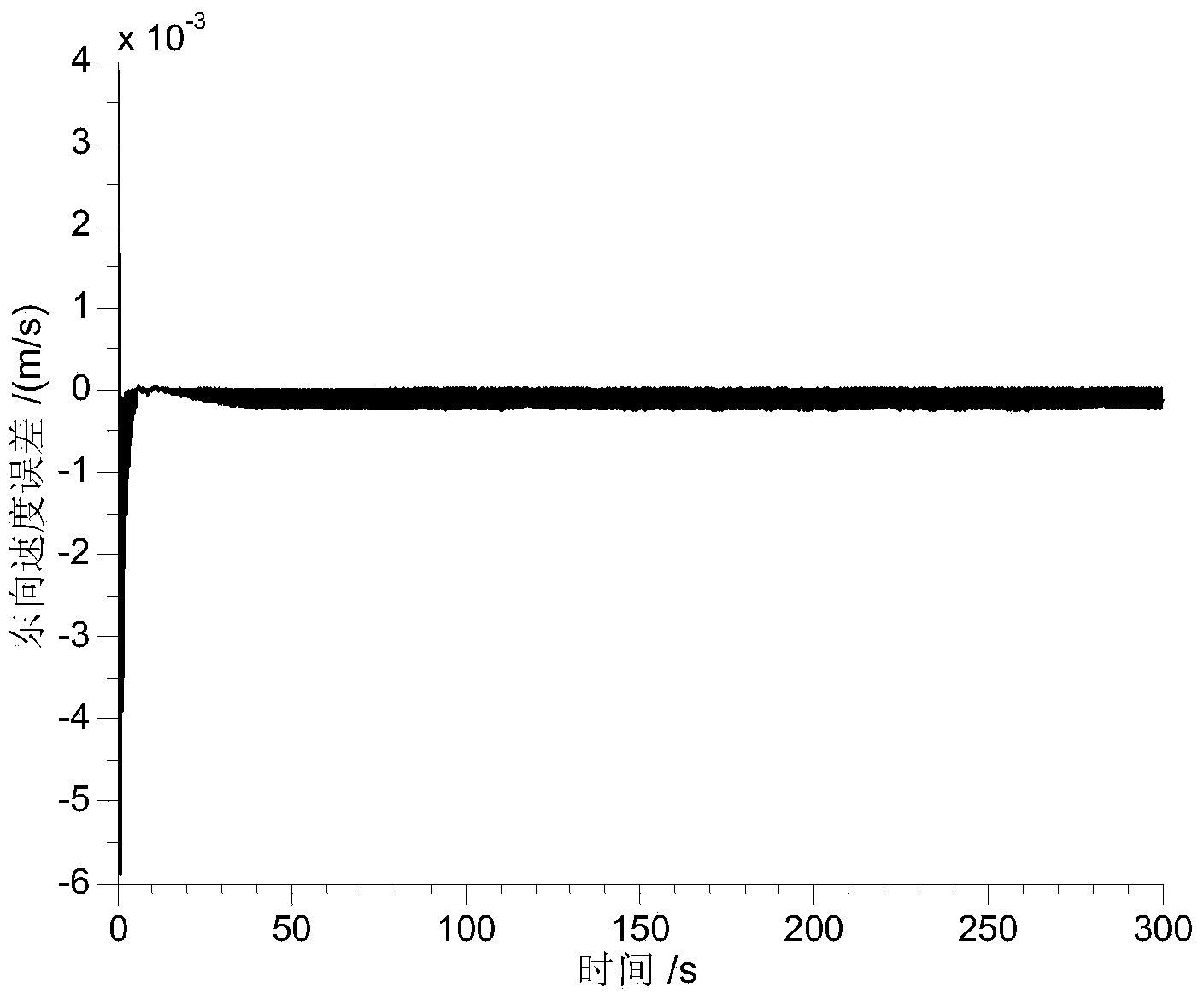
[0086] image 3 , Figure 4 They are the eastward and northward spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More