

Three-dimensional dynamic simulation method for space manipulator assisted docking process
A space manipulator, three-dimensional simulation technology, applied in image data processing, 3D image processing, 3D modeling, etc., can solve the problems of robotic arm motion control trouble, astronauts cannot see the robotic arm intuitively, etc., to achieve simulation Intuitive structure, good visual interaction performance, and more effect of simulation structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
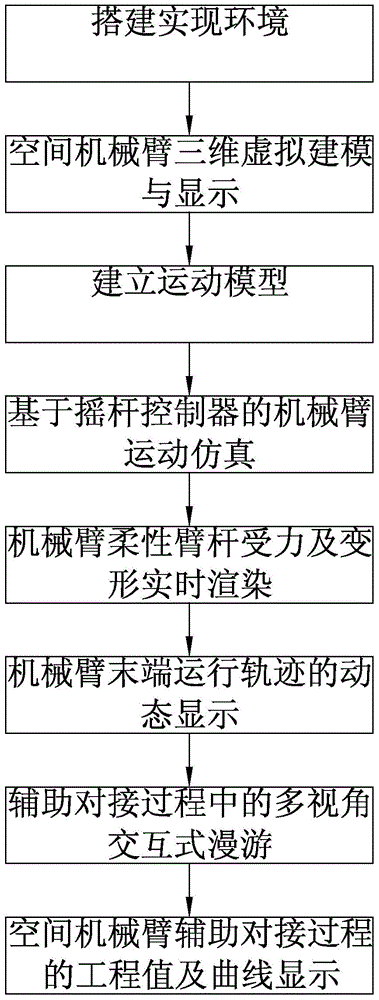
[0015] Specific implementation mode one: combine figure 1 To illustrate this embodiment, the three-dimensional simulation method for the auxiliary docking process of the space manipulator described in this embodiment is realized through the following steps:
[0016] Step 1. Build the implementation environment: use VC++ to build the system platform and human-computer interaction interface, and use the OSG 3D rendering engine to realize the 3D virtual simulation of the docking process assisted by the space manipulator;
[0017] Step 2. Three-dimensional virtual modeling and display of the space manipulator: use 3DSMAX and Multigen Creator to build and assemble the three-dimensional model of the space station and the manipulator, and establish space scenes adjacent to the earth, moon and sun;
[0018] Step 3. Establish a motion model: build a motion model of the space station based on the orbital dynamics model and attitude dynamics model, and import orbital parameters and attit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More