Farmland machine leading line extraction algorithm based on machine vision
A machine vision and navigation line technology, applied in the field of agricultural engineering, can solve the problems of poor adaptability, poor accuracy, slow speed, etc., to achieve the effect of improving the operation speed, improving the poor adaptability and accuracy, and improving the generality of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
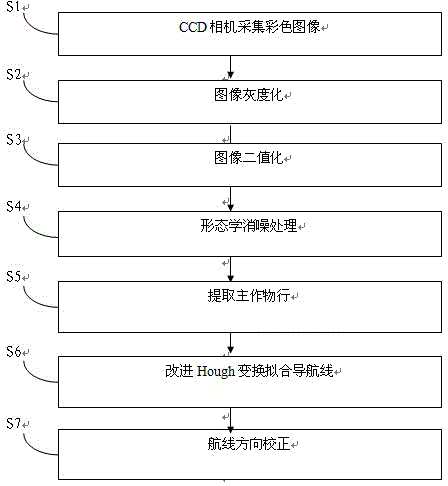
[0025] Such as figure 1 Shown, the farmland machinery navigation line extraction algorithm based on machine vision of the present invention, its steps are as follows:
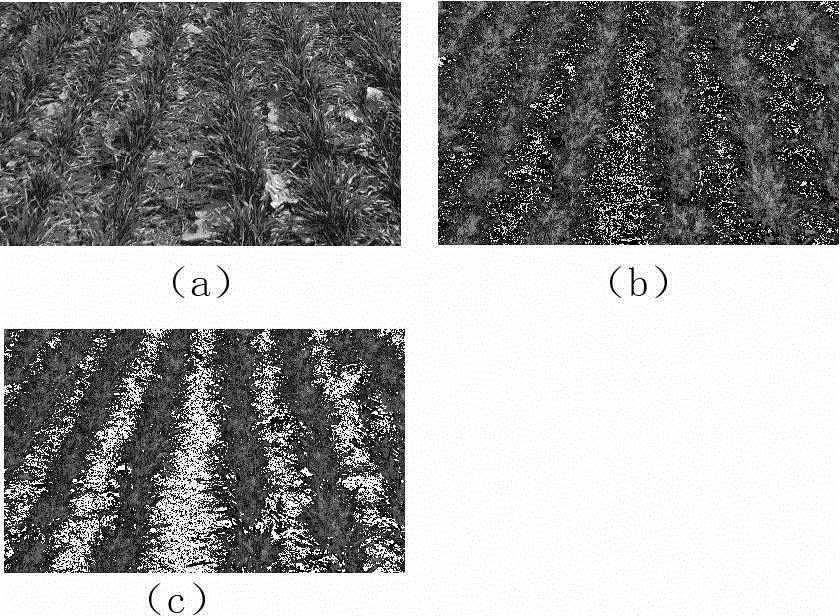
[0026] Step S1: The crop pictures taken by the color digital camera in the real environment of the farmland, such as figure 2 As shown in (a), save it in the computer program in JPG or BMP format, the size of the image is 640*480, based on the developed visual program, the picture can be directly displayed on the program interface;
[0027] Step S2: Use the improved ultra-green factor (1.8G-R-0.8B) to improve the ultra-green image segmentation algorithm, and process the color image to obtain a grayscale image, such as figure 2 As shown in (c), the image processed by the traditional ultra-green image segmentation algorithm is as follows figure 2 as shown in (b);
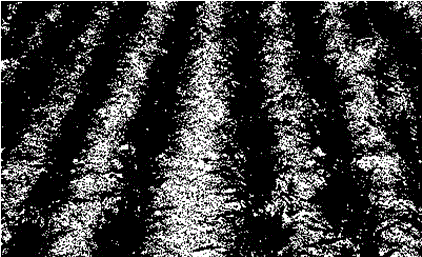
[0028] Step S3: Use the Ostu algorithm to perform binarization threshold processing on the grayscale image, and the obtained binary image is as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More