

Force-sensor-based coupling method for extracranial and intracranial coordinate systems in brain stereotactic surgery of neurosurgery
A neurosurgery, force sensor technology, applied in surgery, medical science, diagnosis, etc., can solve the problems of difficult to meet fast and precise positioning, low positioning accuracy, loss of surgical operation accuracy, etc., and achieve broad market prospects and economic value, data information Accurate, well-designed effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
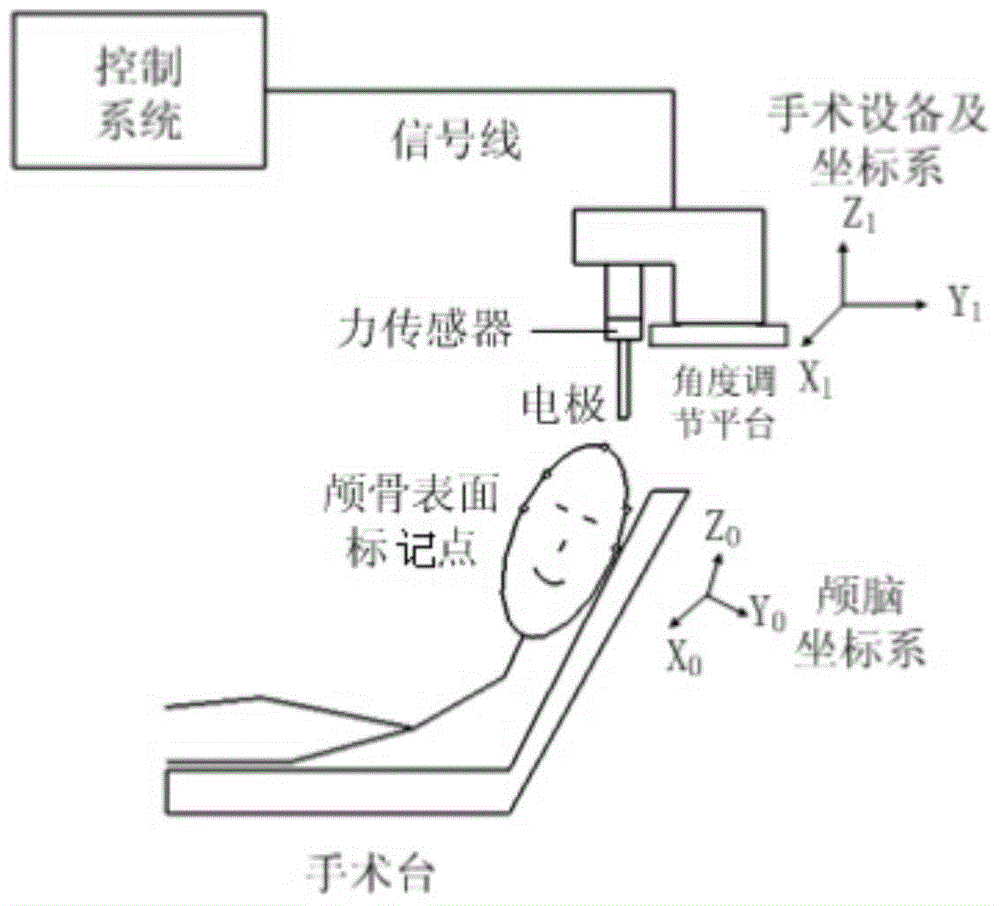
[0046] A method for coupling intracranial and extracranial coordinate systems based on force sensors in neurosurgery brain stereotaxic surgery includes the following steps:
[0047] (1) First, perform a 1.5T Siemens MRI three-dimensional scan directly on the head of a patient with Parkinson's disease, such as Figure 7 As shown, according to the scanning result, the intracranial three-dimensional image data is obtained through computer reconstruction according to the prior art;
[0048] (2) Take the intracranial AC-PC line as the positive direction of the Y axis, and use the midpoint of the AC-PC line as the origin to establish the intracranial Cartesian coordinate system, namely O 0 -X 0 Y 0 Z 0 Coordinate system, where X 0 Y 0 The plane is the axial plane, Y 0 Z 0 The face is the median sagittal plane, X 0 Z 0 The face is coronal, such as Figure 8 with Picture 9 Shown
[0049] (3) Determine the position of the subthalamic nucleus in the skull by calculating the coordinate value of...
Embodiment 2
[0058] A method for coupling intracranial and extracranial coordinate systems based on force sensors in neurosurgery brain stereotaxic surgery. The steps are as described in Example 1. The difference is that the force sensor in step (6) is produced by the American ATI company NANO17 three-axis force and three-axis torque sensor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More