

Automatic control system for pseudo-inclined fully mechanized mining face
An automatic control system and fully mechanized mining face technology, applied in mining equipment, earthwork drilling, tunnels, etc., can solve the problems of working face impact, extrusion frame, hydraulic support and scraper conveyor straightness deviation, etc., and achieve simple structure , easy to use and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
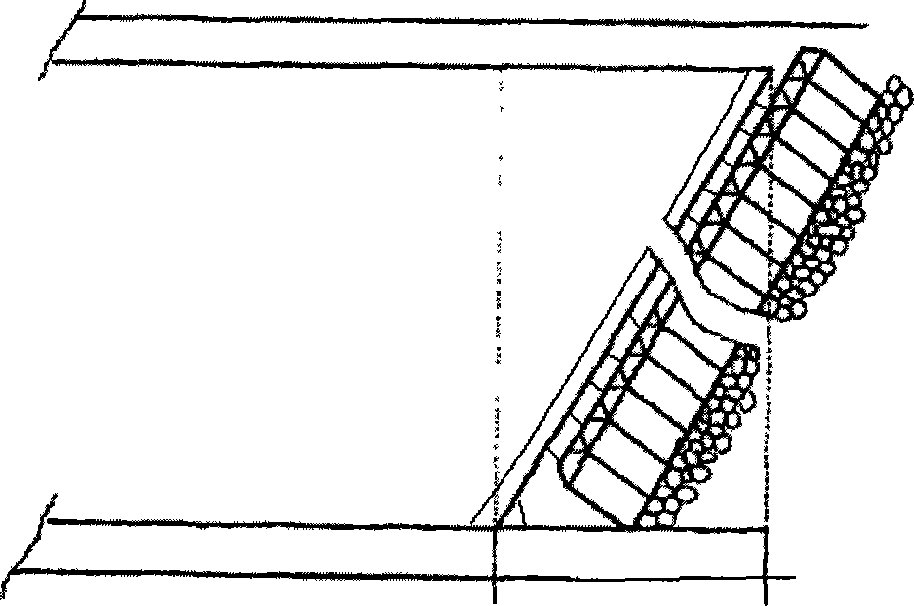
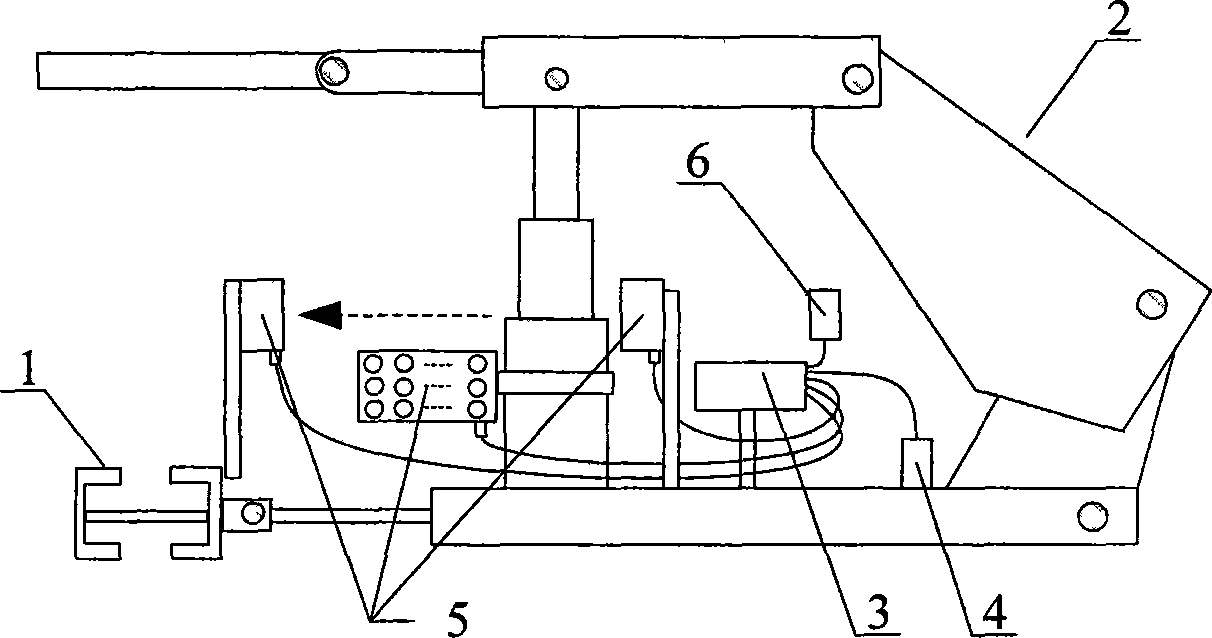
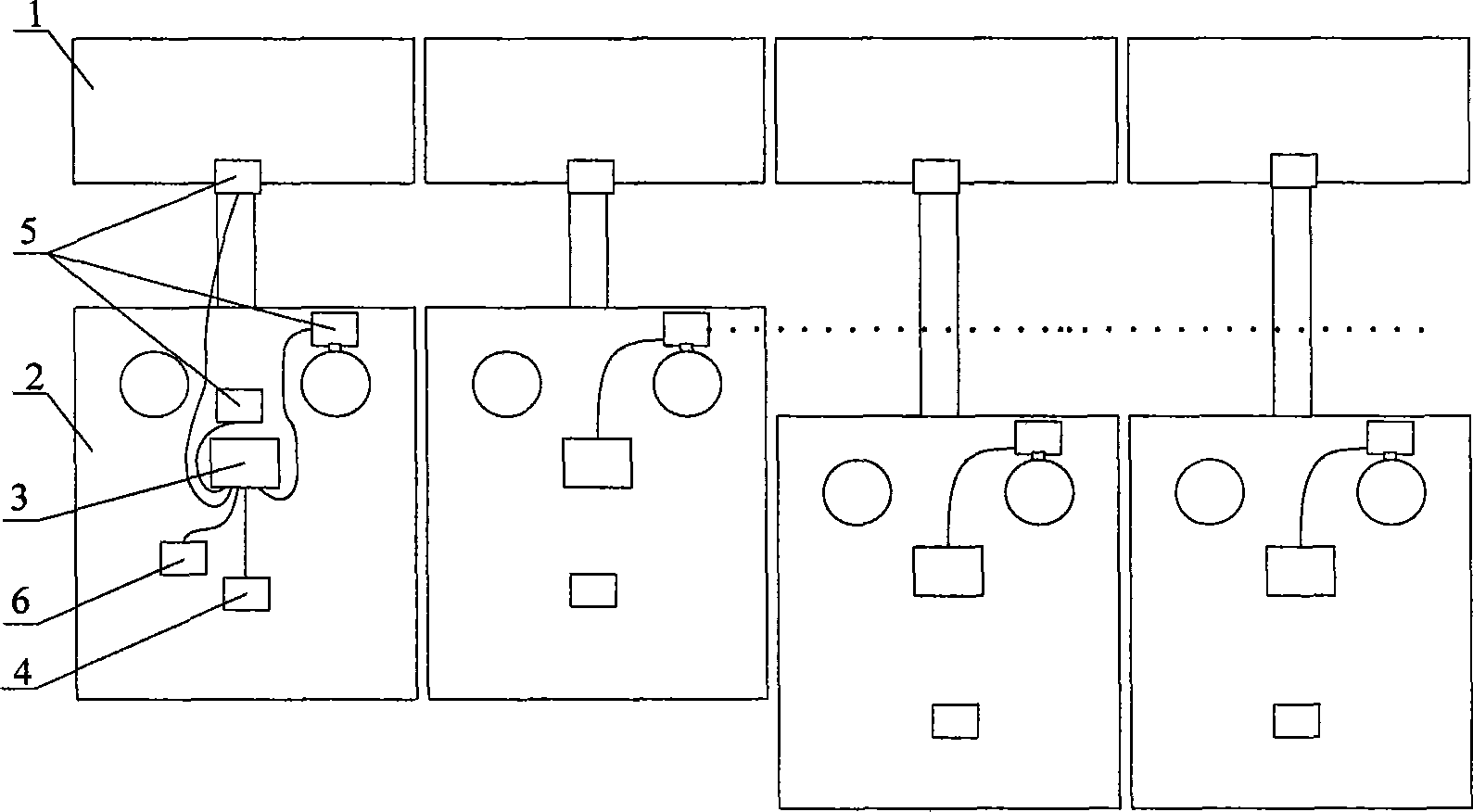
[0020] See attached Figure 1-3 , which describes a preferred embodiment of the pseudo-inclination automatic control system for the fully mechanized mining face according to the present invention. In this embodiment, the mining face is arranged obliquely along the strike, and the working face is arranged according to the pseudo-inclination control mode. It forms a parallelogram, and the scraper conveyor is controlled to move up and down through the pseudo-inclination of the working surface. As the working surface gradually advances, each hydraulic support pushes the front scraper conveyor forward in sequence. A support controller and a laser positioning sensor are installed on the hydraulic support. The support controller performs basic operations such as the movement of the support, and can communicate with other support controllers to send and receive data information. The support controller and the laser positioning sensor Through the connector connection, the support contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More