

Servo system controller optimization method based on expected closed-loop transfer function
A technology of transfer function and optimization method, applied in the direction of total factory control, total factory control, electrical program control, etc., can solve problems such as needing experience, low efficiency, difficult system performance, etc., and achieve good performance results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
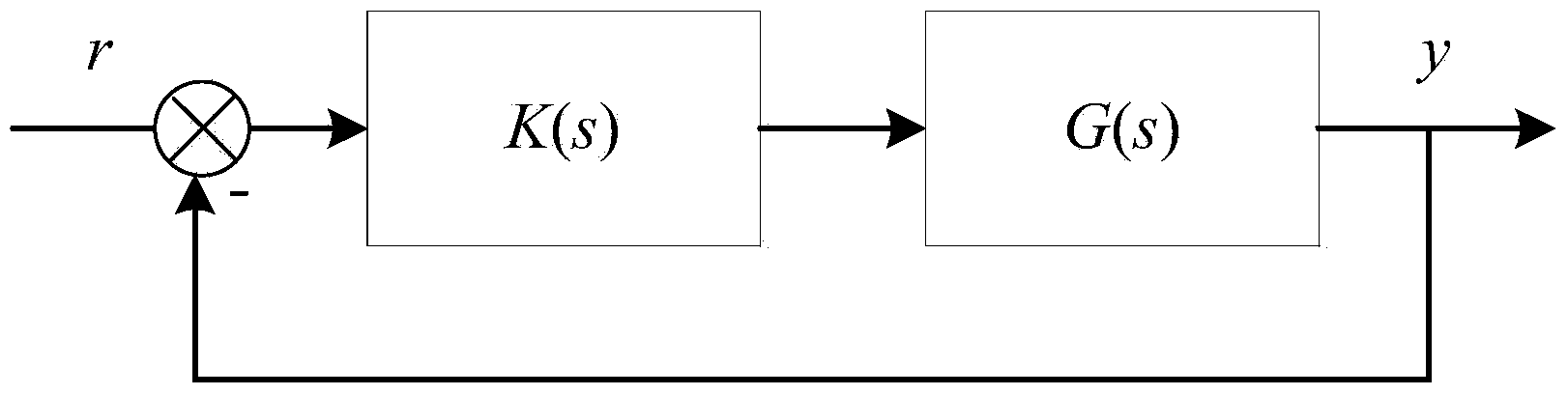
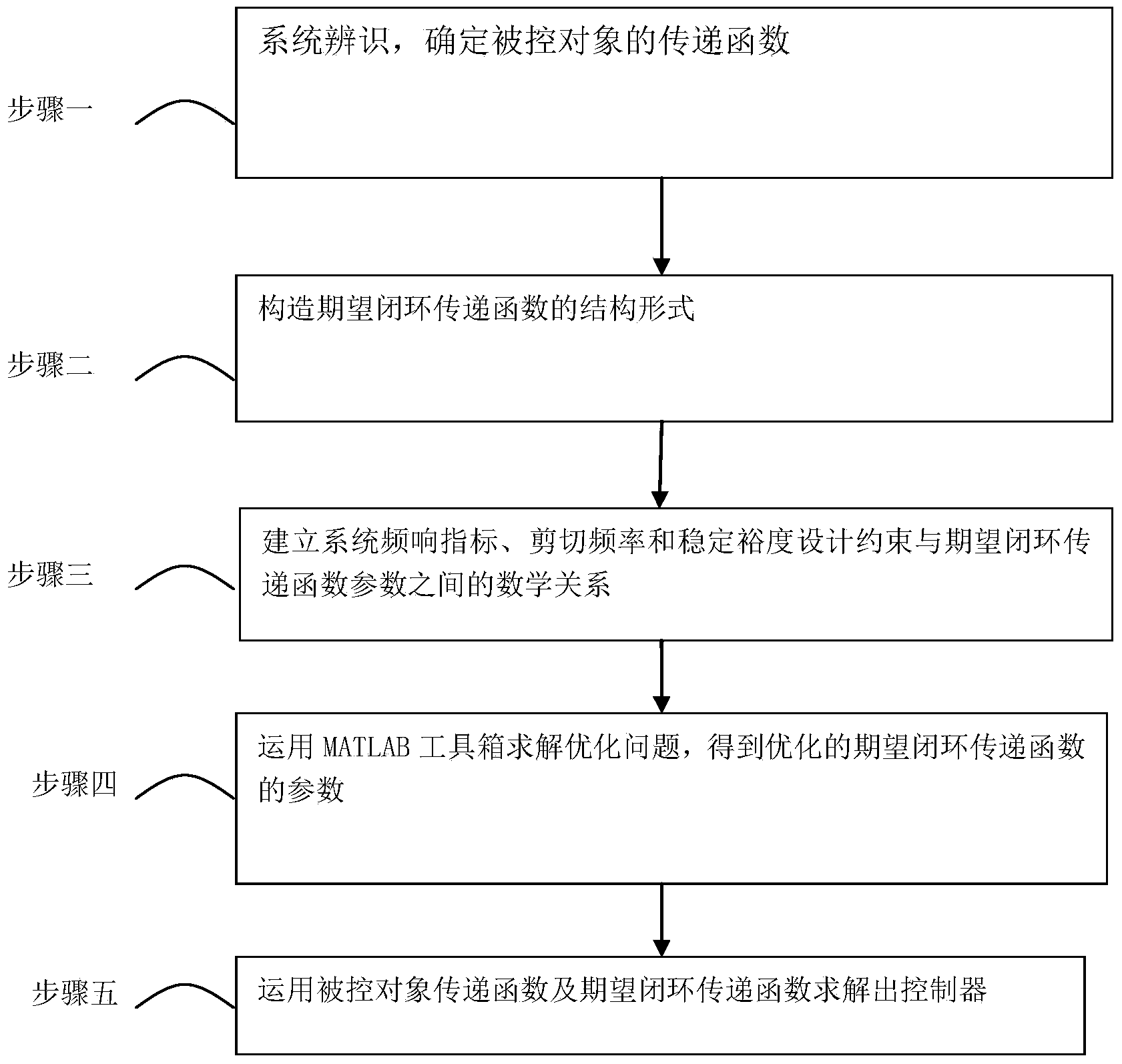
[0028] Specific embodiment one: the servo system controller optimization method based on the expected closed-loop transfer function of this embodiment, combined with figure 2 Specifically, it is prepared according to the following steps:
[0029] Step 1, system identification, determine the transfer function of the controlled object;
[0030] Step 2, constructing the structural form of the expected closed-loop transfer function;
[0031] Step 3, establishing the mathematical relationship between the system frequency response index, shear frequency, stability margin constraints and expected closed-loop transfer function parameters;
[0032] Step 4, use the MATLAB toolbox to solve the optimization problem, and obtain the parameters of the optimized expected closed-loop transfer function;
[0033] Step five, use the controlled object transfer function and the expected closed-loop transfer function to solve the controller.
specific Embodiment approach 2
[0034] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the transfer function of the controlled object in the step one is selected as where k G is the system gain, τ e is the electrical time constant, τ m is the electromechanical time constant, s is the Laplace operator;
[0035] The parameter k in the transfer function of the actual controlled object is measured by substituting the nominal parameter or the method of parameter identification G , τe and τ m , so as to determine the transfer function of the controlled object.
specific Embodiment approach 3
[0036] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the structural form of the desired closed-loop transfer function in the step two is where Φ E (s) is the desired closed-loop transfer function constructed, ξ is the damping ratio, w n is the natural angular frequency, s is the Laplace operator, T is the time constant of the auxiliary inertia link; where, ξ and w n is the parameter to be optimized, and T is used to ensure the physical realizability of the controller, and it is taken as a constant value, usually less than w c is the shear frequency.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More