

Digital helmet display device tracking system of visual-aided inertial measuring unit
A technology of inertial measurement unit and digital helmet, which is applied in helmets, offensive equipment, measuring devices, etc., can solve the problems of inability to meet accuracy requirements, slow processing speed, and large computing space occupied by visual images
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
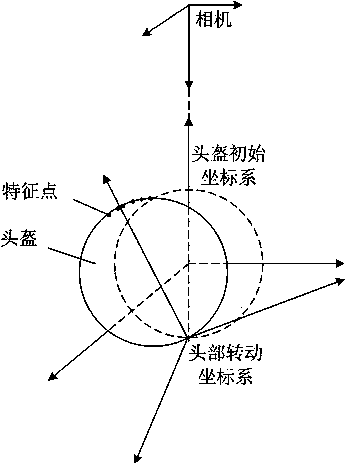
[0122] Specific embodiments, this implementation method combines Figure 1 to Figure 3 To give a detailed introduction to the present invention, the five coordinate systems used in the present invention are such as figure 1 Shown.
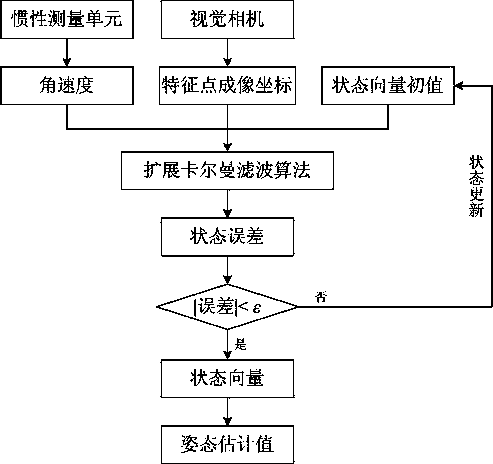
[0123] The method of the present invention is a measurement method of a visual-assisted inertial measurement unit. This method is based on inertial measurement and assisted by visual measurement. The correction method of visual measurement is to correct the inertial measurement error once every fixed time. The algorithm flow of the present invention is as follows figure 2 Shown.
[0124] First, set the initial parameters of the system, including system equipment parameters (such as the initial position of the helmet, the size of the helmet, the number of characteristic points on the top of the helmet and the coordinates in the head rotation coordinate system, the specific parameters and specific positions of the camera, etc. ) And the initial parameter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More