System method for servo motor position control
A technology of servo motor and direction signal, which is applied in general control system, control/regulation system, electrical program control, etc., can solve the problems of counting value cannot reach a stable state, missing counting, wrong counting, etc., to solve the problem of commutation loss Pulse counting, convenient configuration, and the effect of improving position control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
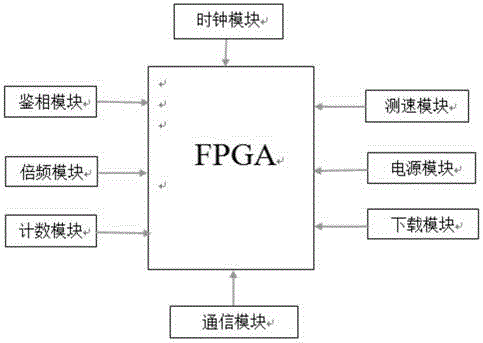
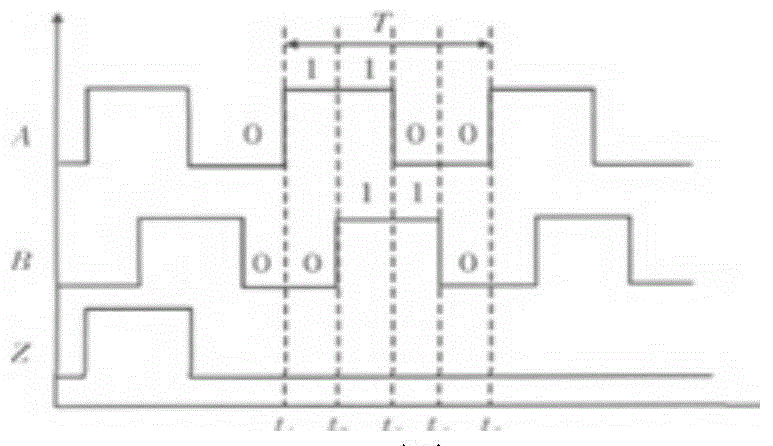
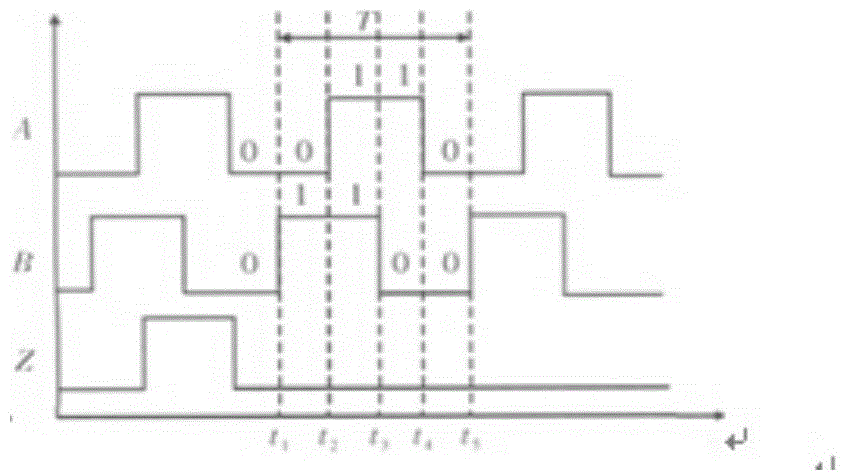
[0017] A system method for position control of a servo motor in this embodiment, firstly utilizes a quadrature encoder to follow the coaxial rotation of the rotor of the servo motor, wherein the position and speed of the rotor rotation of the servo motor are sent to the servo motor by the DSP chip The rotation pulse signal is provided, and the quadrature encoder follows the coaxial rotation of the servo motor to generate quadrature pulses of A and B with the same frequency and a phase difference of 90 degrees, and then collects the two pulses in real time by using the hardware description language by applying the FPGA chip. According to the four changing states of A and B two-phase pulses in one cycle, phase detection and addition and subtraction counting are carried out, and then the FPGA chip sends the calculated count value and speed value back to the DSP chip through the three buses, and the DSP chip according to The number of rotation pulses previously sent to the serv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



