

Stick-slip inertia based serial three-degree-of-freedom piezoelectric precision driving platform
A technology for driving platforms and degrees of freedom, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc. Problems such as poor carrying capacity, to achieve the effect of small and compact structure, rapid response, stable and reliable movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
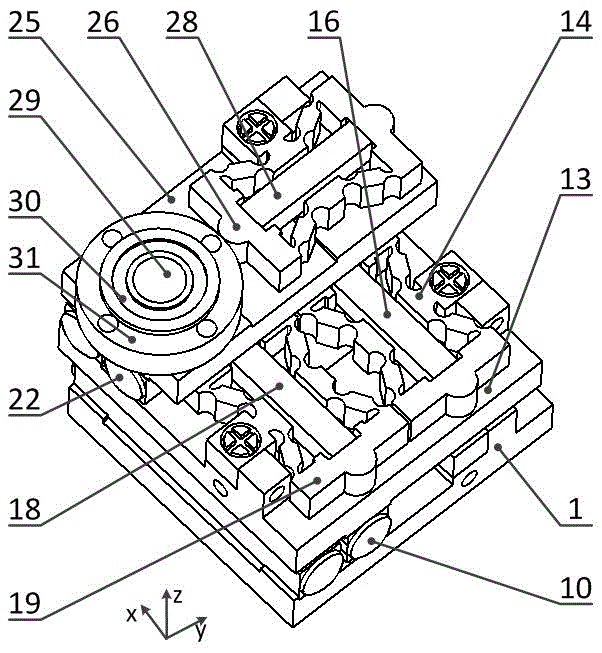
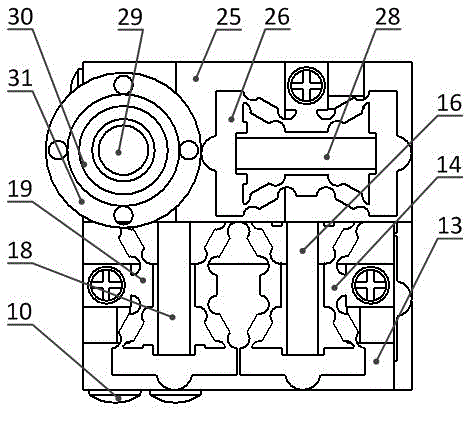
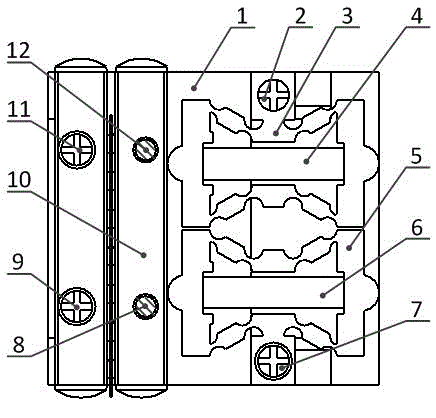
[0023] see Figure 1 to Figure 6 As shown, the series-type three-degree-of-freedom piezoelectric precision drive platform based on the stick-slip inertia of the present invention realizes the fast feed mode and the precision feed mode simultaneously by the bridge-type flexible hinge amplification mechanism: in the initial stage of motion, it is driven by a sawtooth wave, That is, the fast stick-slip inertial drive method is adopted to realize rapid feed of large strokes; in the later stage of motion, continuous voltage control is used to achieve high-precision precision micro-feed; specifically includes the lower x-axis linear drive assembly and the middle y-axis linear drive assembly and the upper z-axis rotary drive assembly, wherein the lower x-axis linear drive assembly has the same mechanism as the middle y-a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More