

Gastrointestinal tract robot mechanism
A robot and gastrointestinal tract technology, applied in medical science, endoscopy, surgery, etc., can solve the problems of unfavorable step ratio, long inchworm robot mechanism, and large axial thickness of the rotating body, and achieve the expansion of step ratio. , the effect of length reduction, efficient movement ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
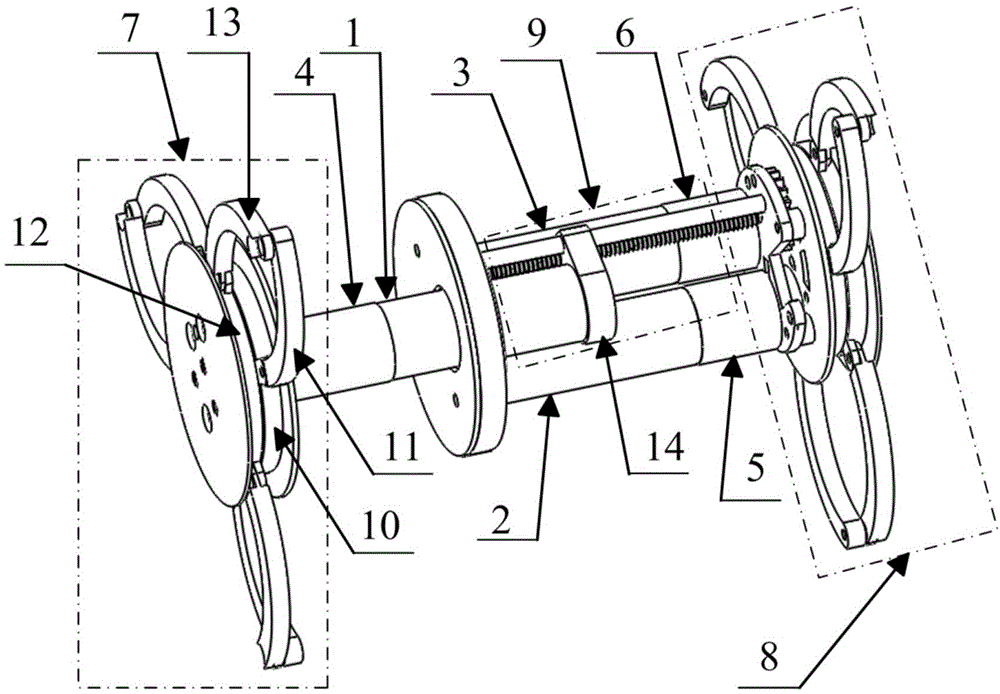
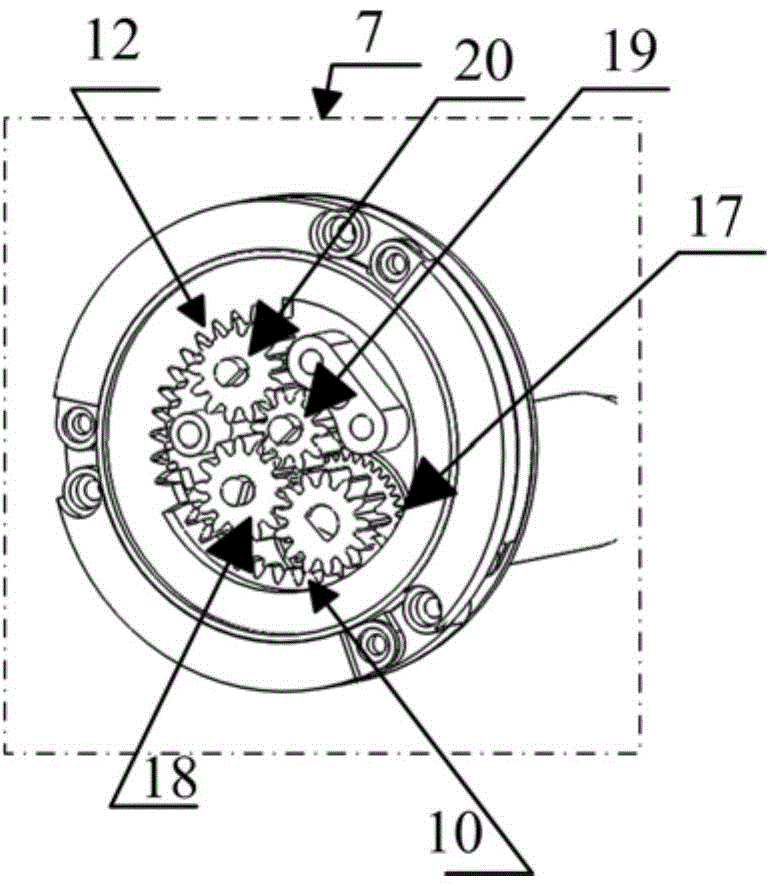
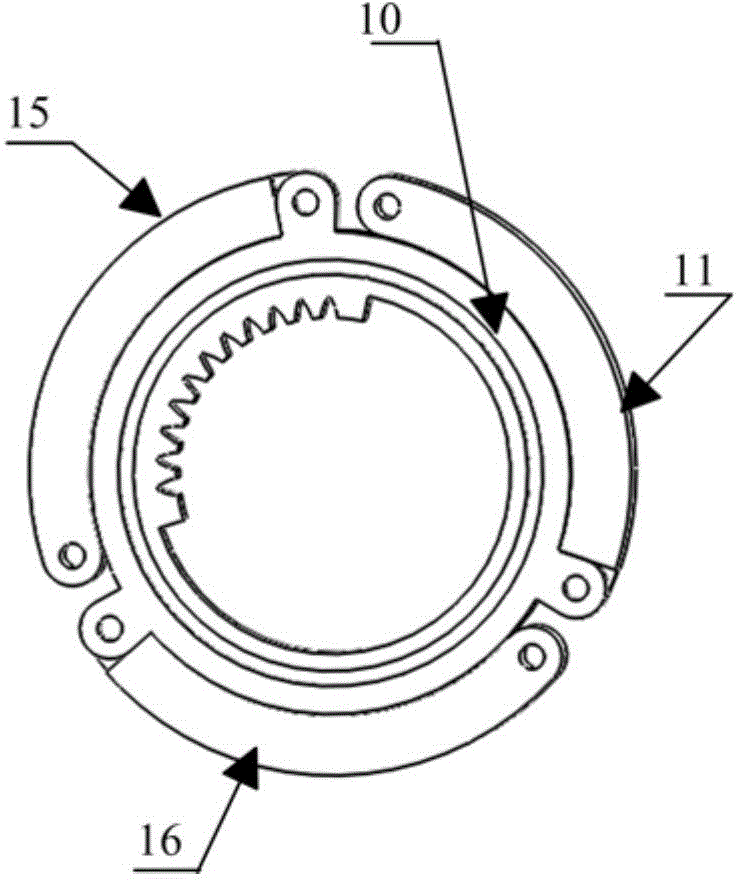
[0024] Such as figure 1 with figure 2 As shown, this embodiment includes: three brushed DC motors 1, 2, 3, three reducers 4, 5, 6, a front end expansion mechanism 7, a rear end expansion mechanism 8 and a middle axial expansion mechanism 9, among which: The ends of each brushed DC motor 1, 2, 3 are respectively connected to a reducer 4 or 5 or 6 and respectively drive the front end expansion mechanism 7, the rear end expansion mechanism 8 and the intermediate axial expansion mechanism, the front end expansion mechanism 7 and the rear The end expansion mechanism 8 has the same structure, including: three pairs of arc-shaped legs 11, 15, 16, a first ring gear 10, a second ring gear 12, an output gear 17 and a transmission gear set, of which: three pairs of arc-shaped legs The legs 11, 15, 16 are evenly arranged on the first ring gear 10 and the second ring gear 12, and the output end gear 17 is connected to the output end of a reducer and is respectively connected to the first ri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More