

Task-oriented active training control method and corresponding rehabilitation robot
A rehabilitation robot and active training technology, applied in the field of rehabilitation robots, can solve the problems of low patient participation enthusiasm, single training strategy, and difficulty in obtaining patients' active movement intentions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The rehabilitation robot has a sensor device, a control system, and a drive mechanism. The control system is used to receive signals collected by the sensor device to generate control instructions, and send the control instructions to the drive mechanism. The drive mechanism can be worn on the patient's body and receive the Control instructions, apply and adjust the force on the patient's body parts according to the control instructions, so as to control the patient's rehabilitation training. Since the mechanical structure of the rehabilitation robot and its conventional control method are prior art, it will not be specifically described in the description of the present invention.
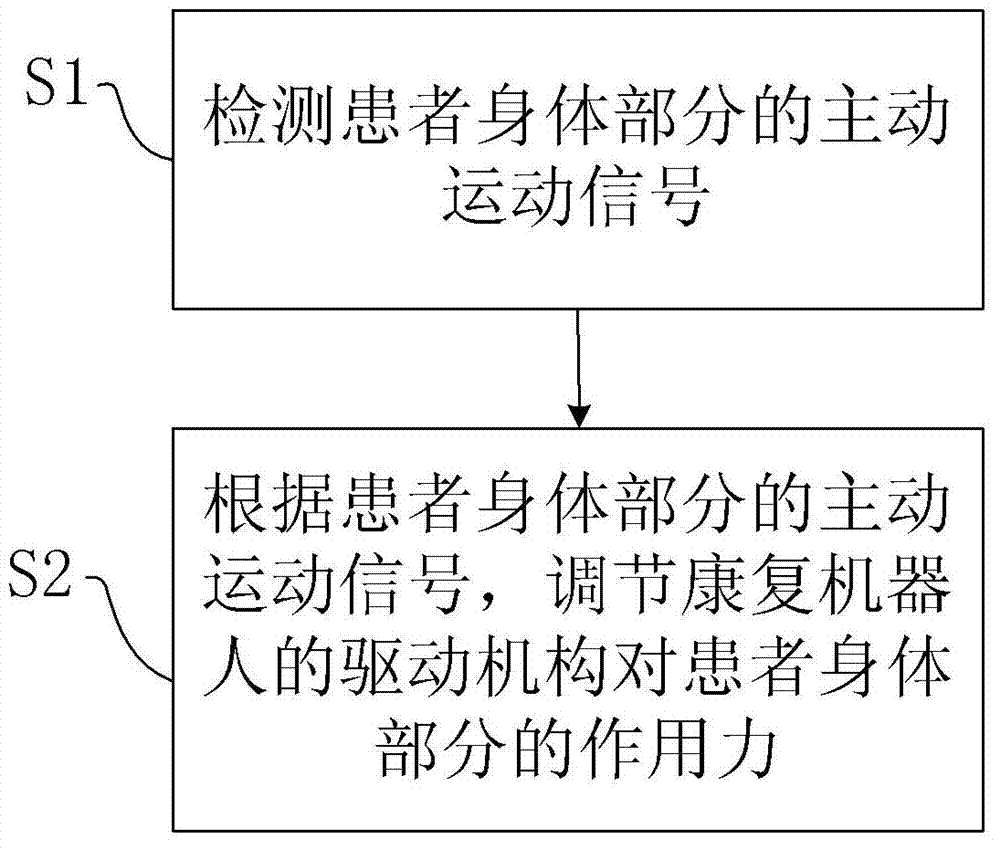
[0056] The invention proposes a task-oriented active training control method applied to rehabilitation robots. figure 1 It is a flow chart of the task-oriented active training control method applied to rehabilitation robots of the present invention, such as figure 1 As shown, the method ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More