

Programming and compiling design method in robot graphical programming system
A graphical programming and design method technology, applied in memory systems, program control design, instruments, etc., can solve problems such as poor system function modification and scalability, increased program debugging difficulty and time, and programming language complexity, etc., to reduce The effect of predicting the number of queries, good scalability and portability, and reducing programming difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to achieve the purpose of the invention and to make the technical solutions and features clearer and clearer, the following further describes the invention with reference to the drawings and specific embodiments:
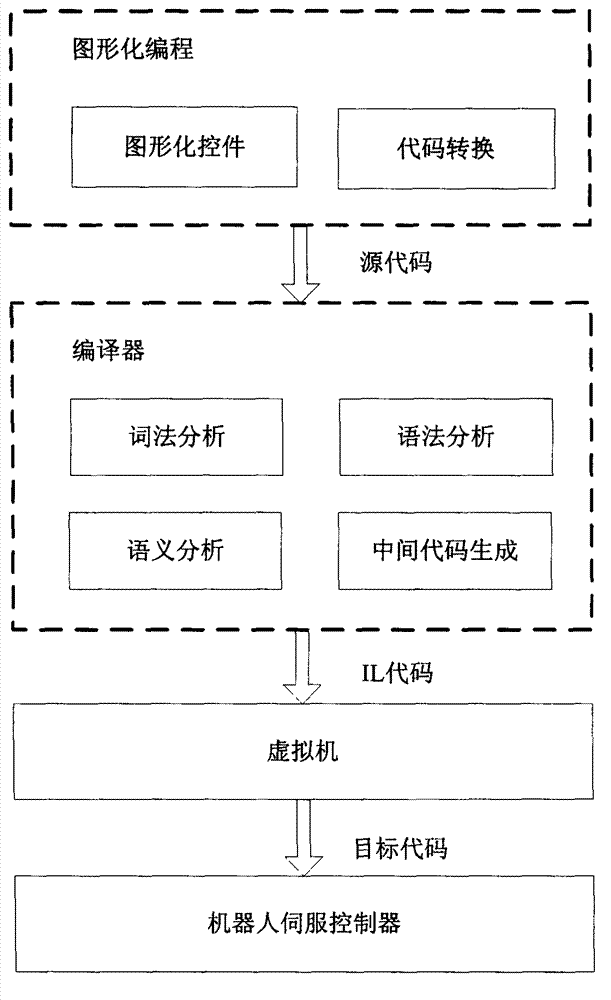
[0018] Attached figure 1 It is the overall execution flow chart of the robot graphical programming control system of the present invention.
[0019] The process includes graphical programming, compilation, and virtual machine analysis. The specific implementation is as follows:
[0020] One, graphical programming
[0021] According to the characteristics of robot motion control, the graphical controls are classified, mainly including the following types:
[0022] Robot graphical programming control classification table
[0023]
[0024]
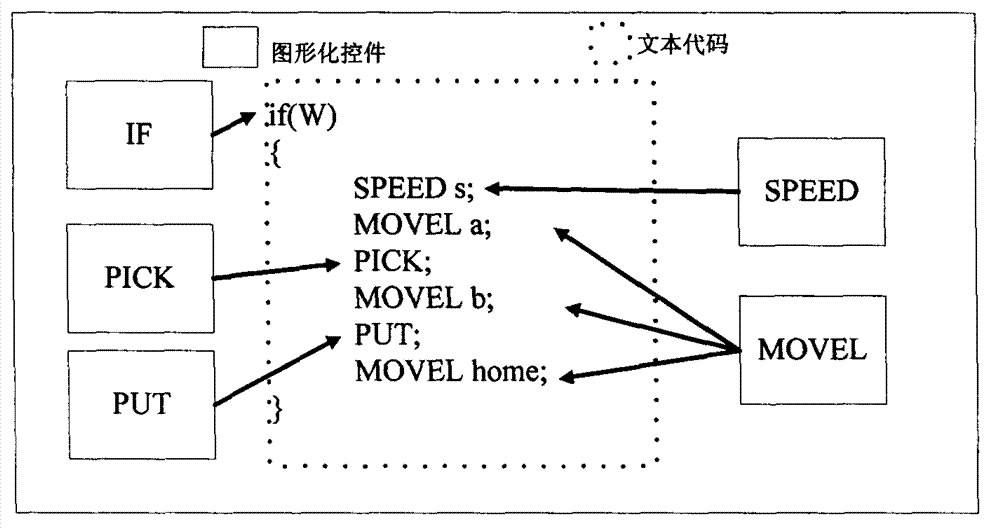
[0025] The design idea of graphical control is to abstract the character code into two parts: fixed structure and filled content. The fixed framework is the stable and unchanging code framework represented by the current co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More