

Control system and method of DELTA robots based on visual tracking
A visual tracking and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of poor versatility and low versatility, and achieve the effect of simple setting, improved versatility, and high versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
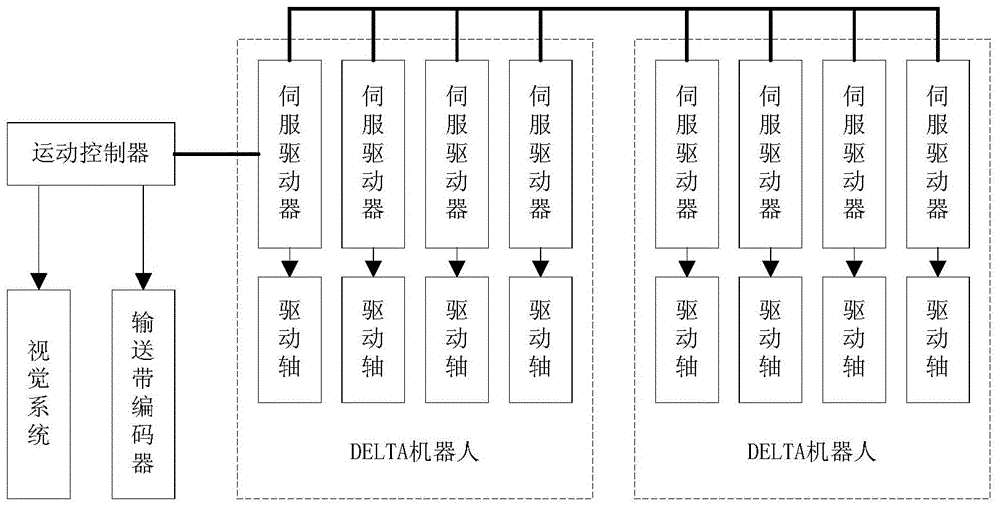
[0037] refer to figure 1 , a DELTA robot control system based on vision tracking, including a motion controller, a vision system, a conveyor belt encoder and two DELTA robots, each of which includes four servo drives and four drive shafts, each The driving shaft is controlled by a servo drive; all the above servo drives are connected in series, and the first servo drive is connected with the motion controller; the vision system and the conveyor belt encoder are connected with the motion controller.
[0038] This system can be realized by using a Sanmotion motion controller and a servo drive system based on SANYO DENKI. One Sanmotion motion controller has two DELTA robots, each DELTA robot has four drive axes, and the two DELTA robots share a vision system. location data. The DELTA robot determines its gripping position based on the position data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More