

Electromagnetic one-dimensional constant force device and its control method
A technology of constant force device and control method, which is applied to grinding automatic control devices, manufacturing tools, and parts of grinding machine tools, can solve the problems of high cost, inability to track fluctuations, and high working noise, and achieve production The effect of low cost, strong adjustability and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
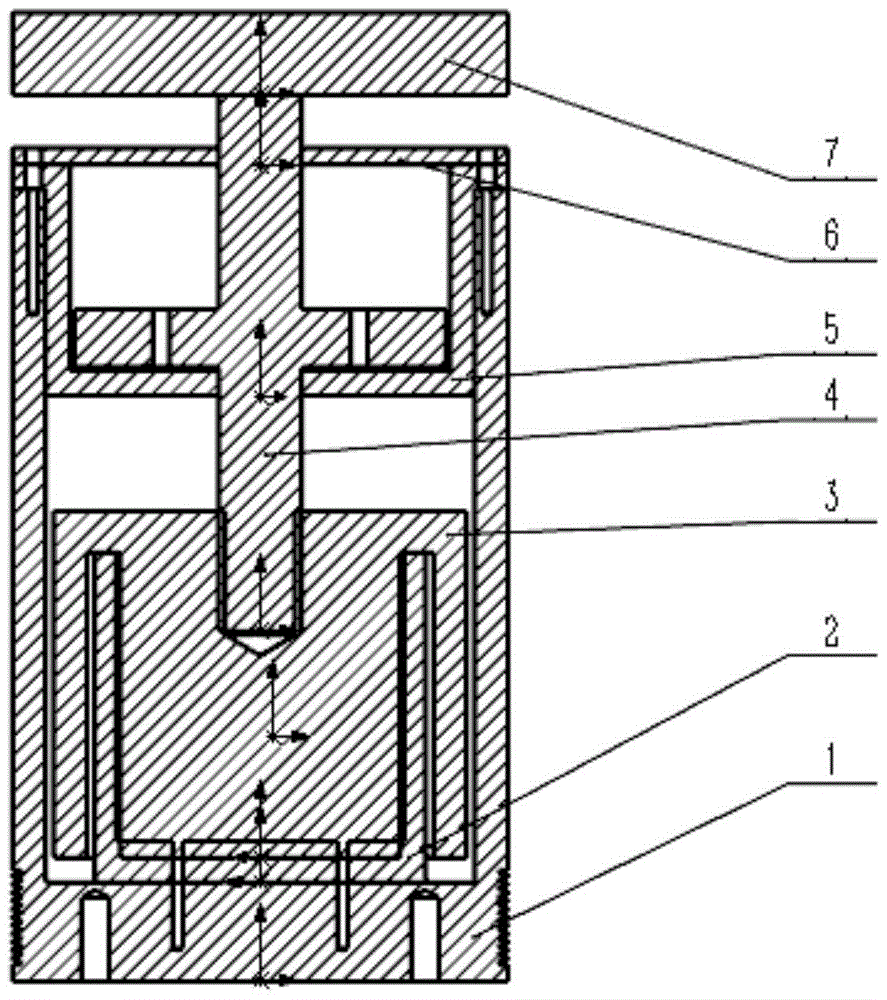
[0066] refer to figure 1 , an electromagnetic one-dimensional constant force device, including a base 1, a voice coil motor, a push rod 4, an end cover 5, a cover 6 and a controller, the push rod 4 is a cross-shaped structure, and the base 1 is a cylindrical structure with a sealed bottom , the voice coil motor is set in the base 1, the end cover 5 and the cover 6 are installed on the top of the base 1 in sequence, the end cover 5 is concave toward the bottom of the base 1 and forms a limiting space with the cover 6, One end of the push rod 4 passes through the end cover 5 and is connected to the voice coil motor. The other end of the push rod 4 protrudes from the cover 6 and a sensor module 7 is installed at the end. Driven by the voice coil motor, the push rod 4 moves in the limited space Inwardly moving, the end cover 5 plays a limiting role on the beam of the push rod 4;
[0067] The sensor module 7 is used to collect the force signal and attitude signal of the constant f...
Embodiment 2
[0075] The control method of the electromagnetic one-dimensional constant force device of Embodiment 1 includes:
[0076] S1. Obtain the constant force between the constant force device set by the user and the workpiece;
[0077] S2. Obtain the real-time force signal and attitude signal of the constant force device collected by the sensor module 7. The sensor module 7 includes a one-dimensional force sensor for collecting the force signal of the constant force device and an attitude signal for collecting the constant force device. The three-axis gyroscope;
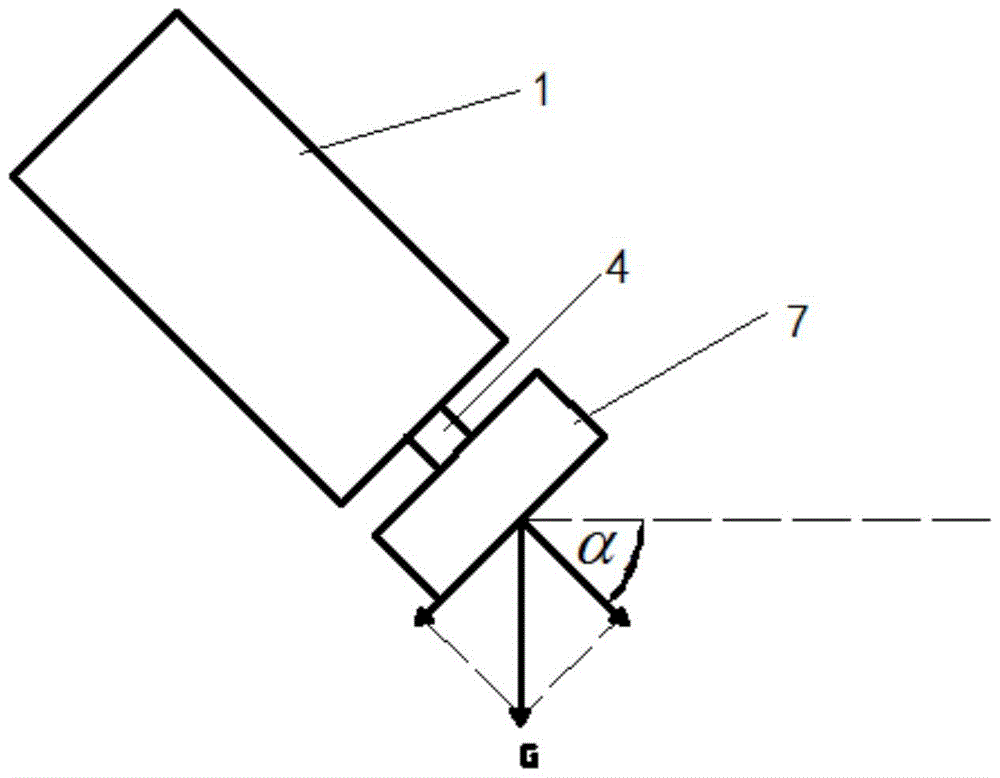
[0078] S3. Calculate the target force signal of the sensor module 7 in combination with the set constant force and the acquired attitude signal, specifically:
[0079] According to the following formula, the target force signal of the one-dimensional force sensor is calculated by combining the set constant force and the acquired attitude signal:
[0080] f 目标 = f 接 +m 2 gsin(α)
[0081] Among them, f 目标 Represents t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More