

Six-degree-of-freedom chewing robot control system
A chewing robot and control system technology, applied in the field of robotics, can solve problems such as difficulty in obtaining PID control parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below, based on accompanying drawing, embodiment of the present invention is described in detail:
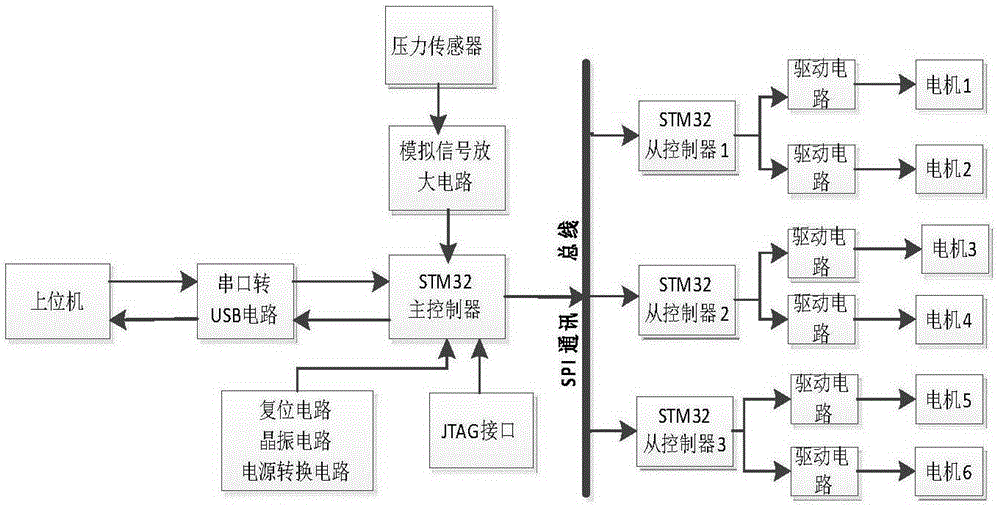
[0040] The object of the present invention is to invent a chewing robot control system for simulating human chewing action to study the mechanical properties of food. Human mastication is the contraction of more than 20 masticatory muscles, which are affected by many non-deterministic factors such as the shape, size and toughness of the food. The masticatory muscles contract under the control of the nerves to provide the source of power for the jaw movement. Based on the anatomy of human masticatory muscles, the pterygoid muscles involved in human mastication include the inner pterygoid muscle and the outer pterygoid muscle. The temporal muscle is composed of three bundles of muscles: front, middle and back. The masseter muscle is composed of deep masseter muscle and superficial masseter muscle. , so this patent utilizes the parallelogram law of the mechanical principle t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More