Weight self-balancing radiotherapy particle implantation robot
A technology of radiotherapy and robotics, applied in the field of medical devices, can solve the problems of uncertainty in the accuracy of particle implantation, complex overall structure, and prolonged operation time, and achieve a stable and reliable particle implantation process, simple overall structure, and reduced The effect of operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] A self-balancing radiotherapy particle implantation robot of the present invention will be described in detail below with reference to the accompanying drawings and specific implementation examples.
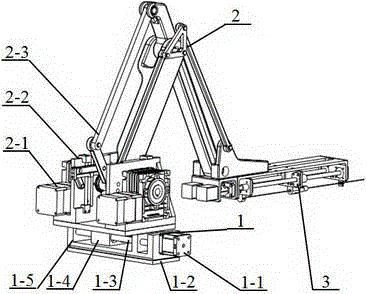
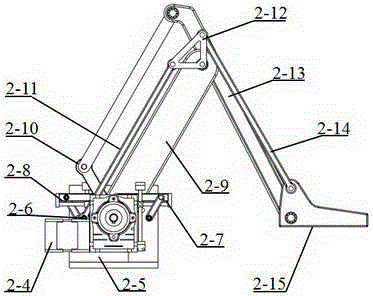
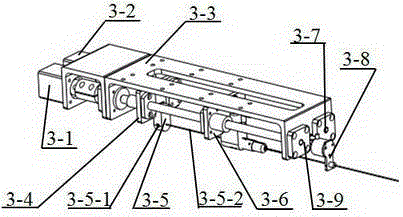
[0030] Such as figure 1 , figure 2 As shown, a self-weight-balanced radiotherapy particle implantation robot includes an electric moving mechanism 1, a 2R positioning mechanism 2 is fixedly connected to the electric moving mechanism 1, and a large arm 2-9 and a small arm 2-13 of the 2R positioning mechanism 2 are provided There is a vertical cross-type spring balance mechanism, which can realize the static moment balance of any posture when the configuration of the big arm 2-9 and the small arm 2-13 changes. The 2R initial positioning mechanism 2 also has Fixed double-screw screw-type particle implantation mechanism 3, electric moving mechanism 1 and 2R positioning mechanism 2 can realize rapid initial positioning of the puncture needle, vertical cross spring balance mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com