

Leap motion parallel mechanical arm based on Leap Motion and operation method and control system of leap motion parallel mechanical arm
A manipulator and parallel technology, applied in manipulators, manufacturing tools, etc., to improve work efficiency, ensure efficient use, and save space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
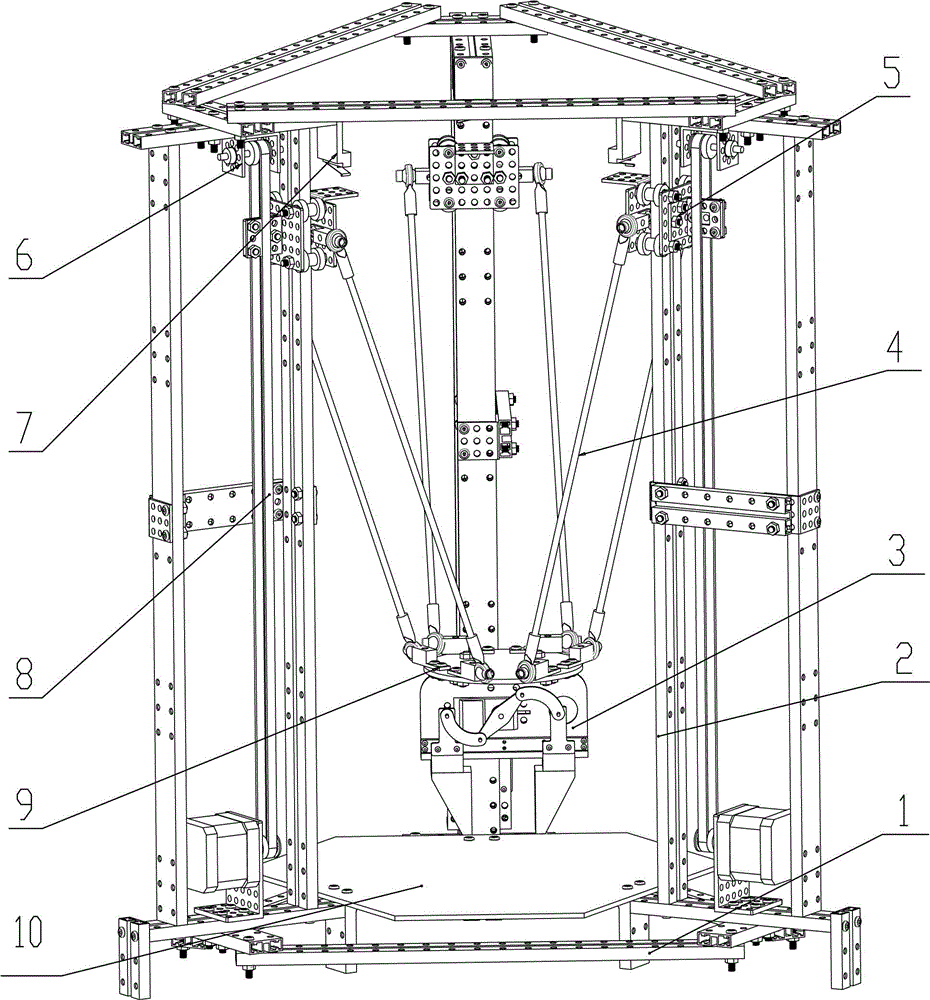
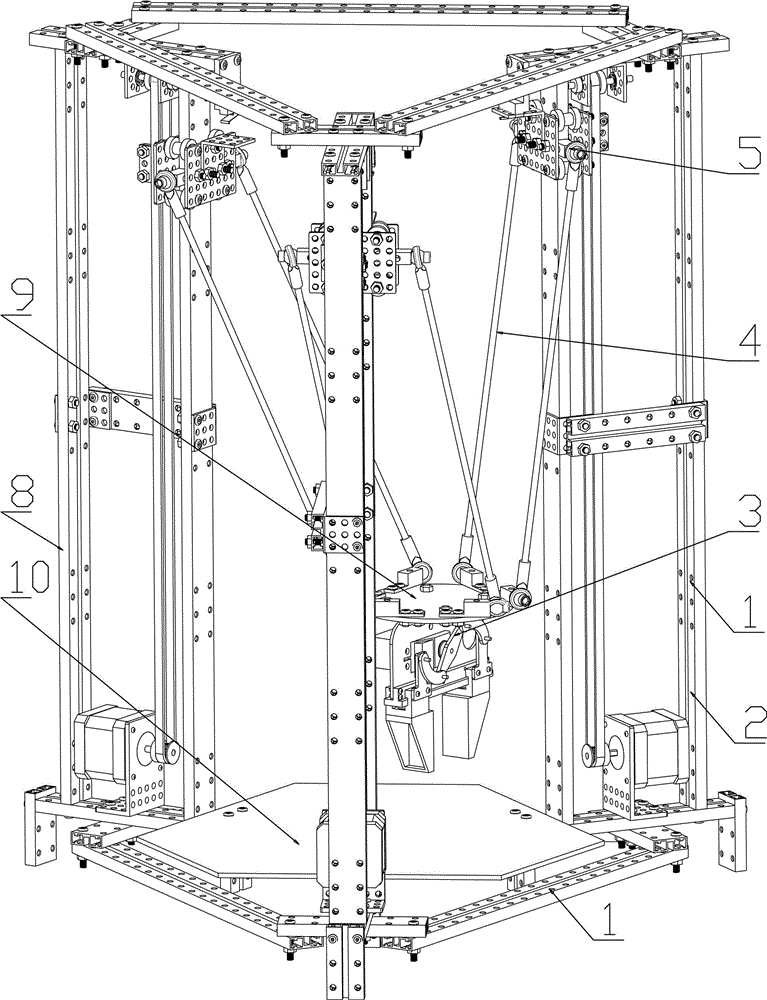
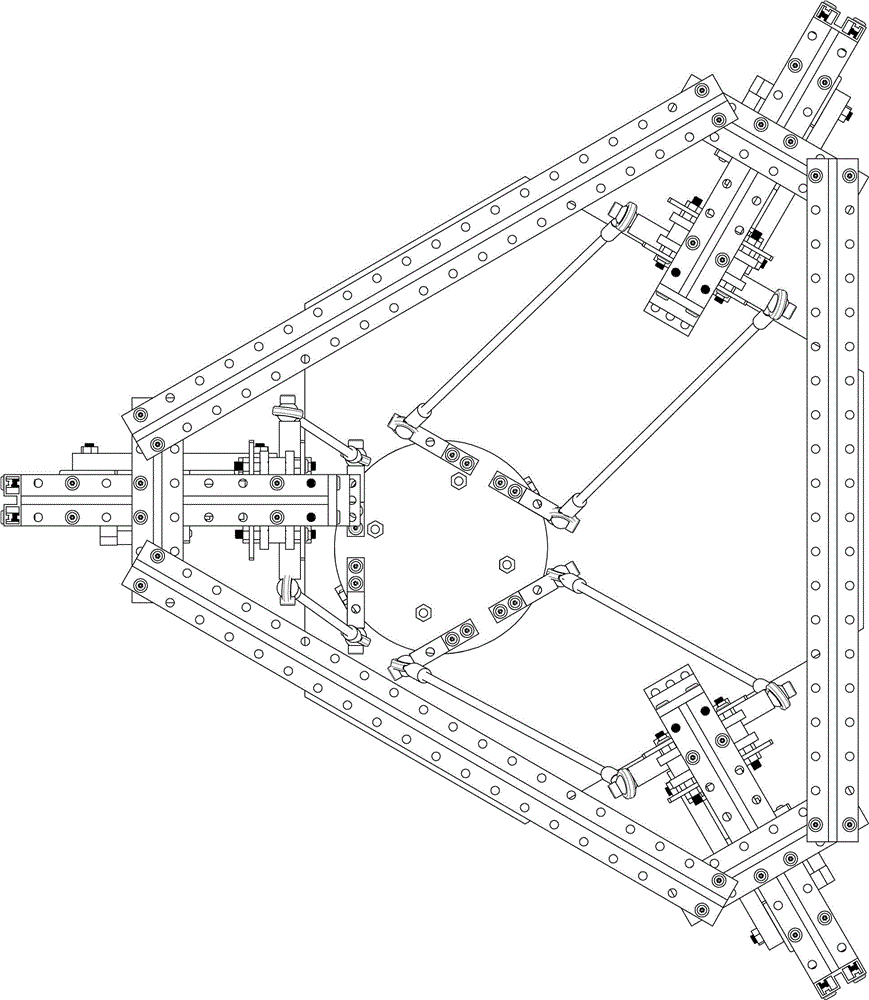
[0046] Such as Figure 1-4 , a somatosensory parallel manipulator based on LeapMotion, which includes a bottom connecting bracket 1 of the parallel manipulator, three connecting brackets 1 and three stepping motor brackets 2 are connected end-to-end to form a hexagonal frame base, and the stepping motor bracket 2 is fixedly installed There is a miniature touch switch 7, and the miniature touch switch 7 is used to control the emergency stop of the pulley block bracket 5 installed on the stepping motor bracket 2, and limit the upper limit position of the pulley block. Synchronous belt 8, the upper end of the threaded rod assembly 4 is connected to the pulley block bracket 5, the lower end is connected to the manipulator fixture 9, the manipulator 3 is fixed on the lower end of the manipulator fixture 9, and the manipulator 3 is directly below the chassis 10 for storing objects. The up and down sliding of a pulley block bracket 5 is used to control the picking and placing of obje...
Embodiment 2
[0057] Such as Figure 9 , the operation method of the somatosensory parallel manipulator based on LeapMotion, which includes the following steps:
[0058] T1, the real-time data provided by the hands, fingers or tools within the bounding field of vision through Leap, these data are mostly expressed by collection or frame data, each frame contains a series of basic binding data, the device will give each The basic binding data of the series is marked with a unique ID number. As long as the entity does not leave the visible area of the device, the ID number will remain unchanged. A gesture library for controlling parallel manipulators is established through different gestures, including the up and down of the manipulator. Down, left, right, forward, backward, grab and release actions. Gesture libraries can also be established by using real-time recognition of gestures in the scene and custom data.
[0059] T2, the operator manually operates on LeapMotion to form different g...
Embodiment 3
[0069] Such as Figure 10 , the control system of the somatosensory parallel manipulator based on LeapMotion, which includes the AVR main control board, the LeapMotion controller is connected with the signal input terminal of the AVR main control board through the signal line; the external input signal input terminal is also connected with the AVR main control board; the AVR main control board The signal output end of the control board is connected to three synchronous motors 208 at the same time, and then respectively realizes the up and down sliding of the three sets of pulley brackets 5, and at the same time connects to the input end of the AVR main control board through the micro touch switch 7 and the lower limit baffle plate 211 , forming a closed-circuit control loop; the steering gear 312 of the manipulator 3 is connected to the signal output terminal of the AVR main control board to realize the picking action of the object.
[0070] Concrete work process of the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More