

Tendon-driving robot finger mechanism
A robot finger and tendon drive technology, applied in the field of robotics, can solve the problems of high machining cost, reduced finger reliability, complex transmission structure, etc., and achieve the effect of simplifying drive and transmission, simple structure, and reducing the weight of fingers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
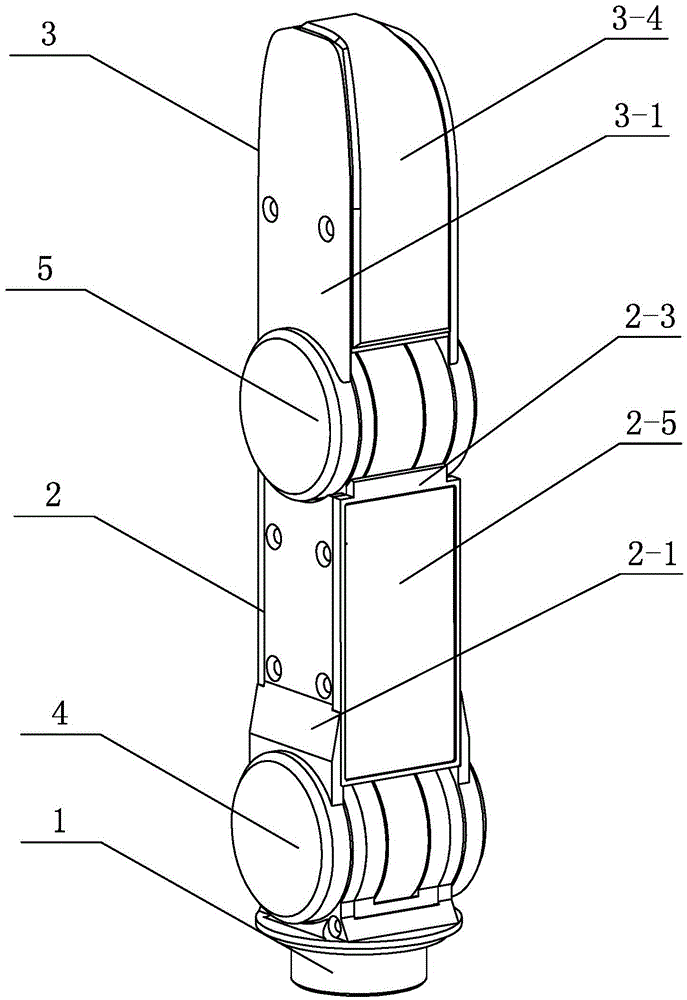
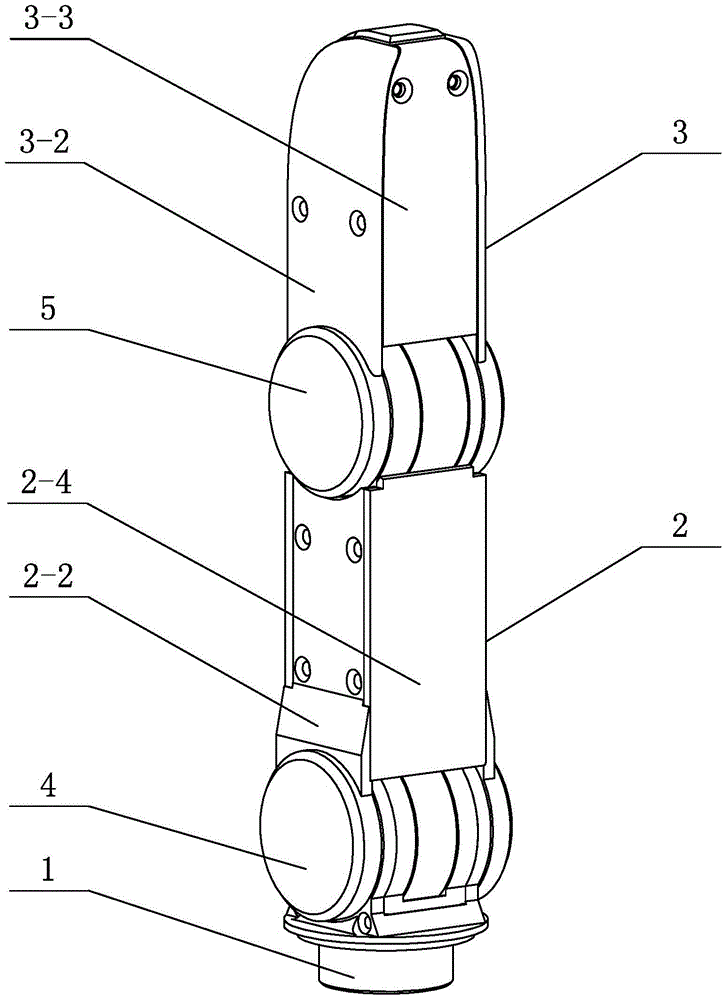
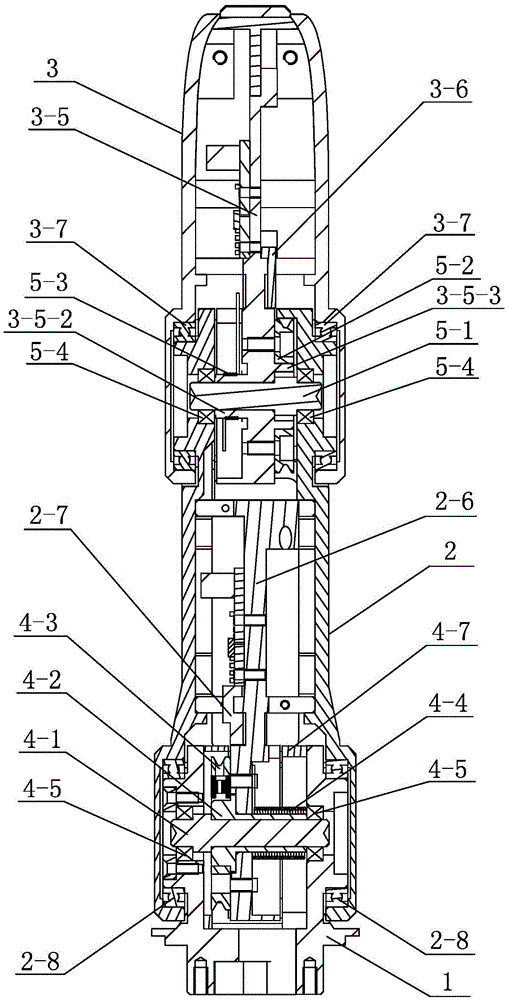
[0029] Specific implementation one: as Figure 1 to Figure 10 As shown, this embodiment describes a tendon-driven robot finger mechanism, comprising a base 1, a proximal phalanx 2, a distal phalanx 3 and two pitching joints, the two pitching joints are the base Joint 4 and end joint 5; the proximal phalanx 2 includes a proximal phalanx housing, a proximal phalangeal force transmission member 2-6 and two proximal phalangeal support bearings 2-8, and the proximal phalangeal housing includes a proximal phalanx housing. The left side plate of the phalanx 2-1, the right side plate of the proximal phalanx 2-2, the front cover plate of the proximal phalanx 2-3 and the rear cover plate of the proximal phalanx 2-4, the said rear cover plate of the proximal phalanx 2- 4 and the proximal phalanx front cover plate 2-3 are respectively connected with the proximal phalanx left side plate 2-1 and the proximal phalanx right side plate 2-2 (through screws); the upper end of the base 1 is provi...
specific Embodiment approach 2
[0033] Specific implementation two: as Figure 1 to Figure 3 As shown, in the tendon-driven robotic finger mechanism described in Embodiment 1, the base 1, the proximal phalanx shell and the terminal phalanx shell are all made of polyimide non-metallic materials.
specific Embodiment approach 3
[0034] Specific implementation three: as image 3 As shown, in the tendon-driven robotic finger mechanism described in the second embodiment, the proximal phalanx force transmission members 2-6 and the end phalangeal force transmission members 3-5 are both made of aluminum alloy materials.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More