

Orthogonal plane calibrating method and orthogonal plane calibrating system of relation between laser distance measuring device and end of mechanical arm
A laser rangefinder and calibration method technology, applied in the field of visual measurement, can solve problems such as insufficient constraints and poor repeatability of the hand-eye calibration matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] The present invention will be further elaborated below through specific embodiments in conjunction with the accompanying drawings.
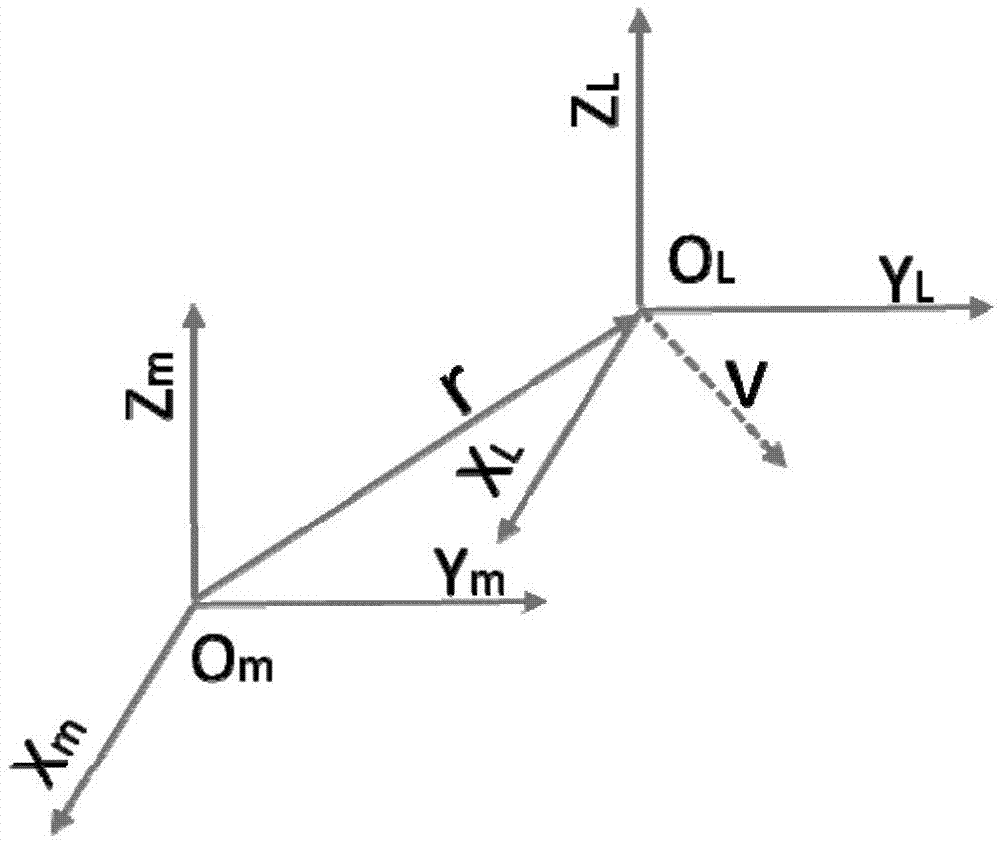
[0106] The coordinate system at the end of the manipulator is O m , X m , Y m and Z m are the three coordinate axes of the coordinate system at the end of the manipulator, and the coordinate system of the laser rangefinder is O L , X L , Y L and Z L They are the three coordinate axes of the laser rangefinder coordinate system. The laser rangefinder coordinate system is only translated by r relative to the coordinate system at the end of the manipulator. The unit direction vector of the laser beam emitted by the laser rangefinder is in the laser rangefinder coordinate is v, such as figure 1 shown.
[0107] The following spatial point coordinates and vectors are represented by 3*1 column vectors, the normal vector is a unit vector, and the unit direction vector of the laser beam is also a unit vector.
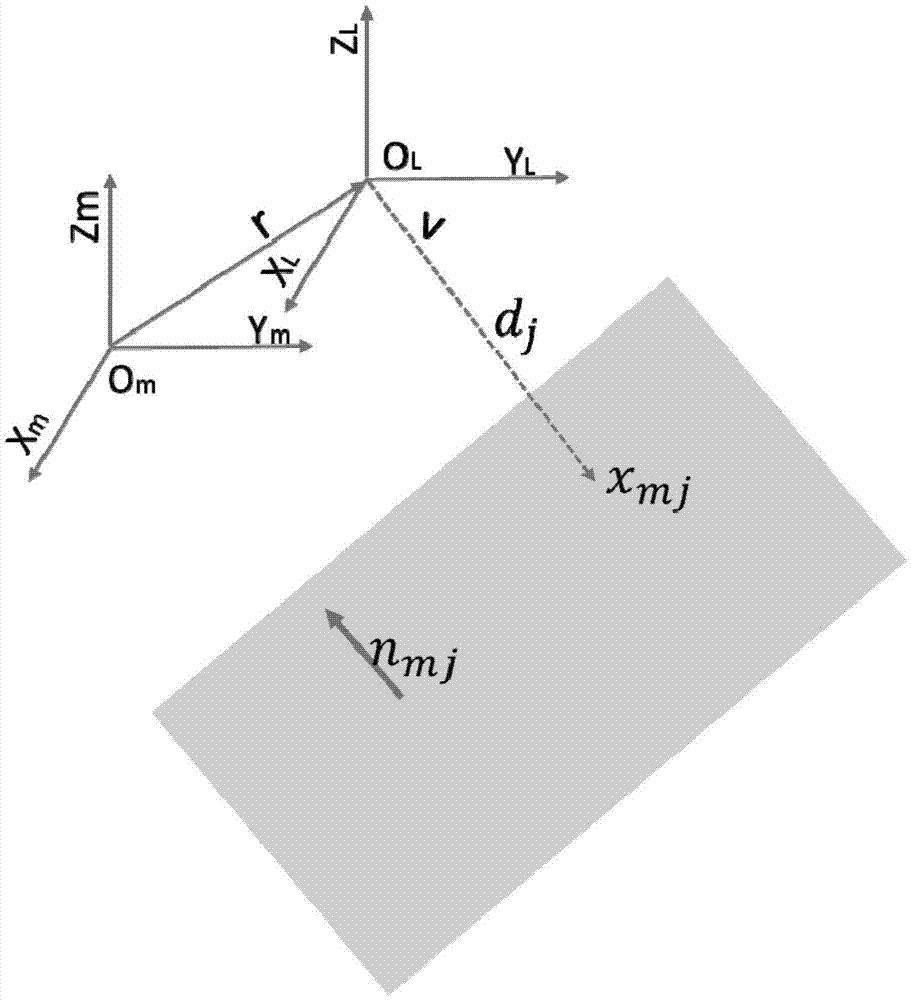
[0108] like figure 2 As sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More