Double view window based route characteristic identifying, deviation measuring, and accurate positioning method
A path feature and deviation measurement technology, which is applied in neural learning methods, photo interpretation, biological neural network models, etc., can solve problems such as lack of consideration of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with specific embodiments.
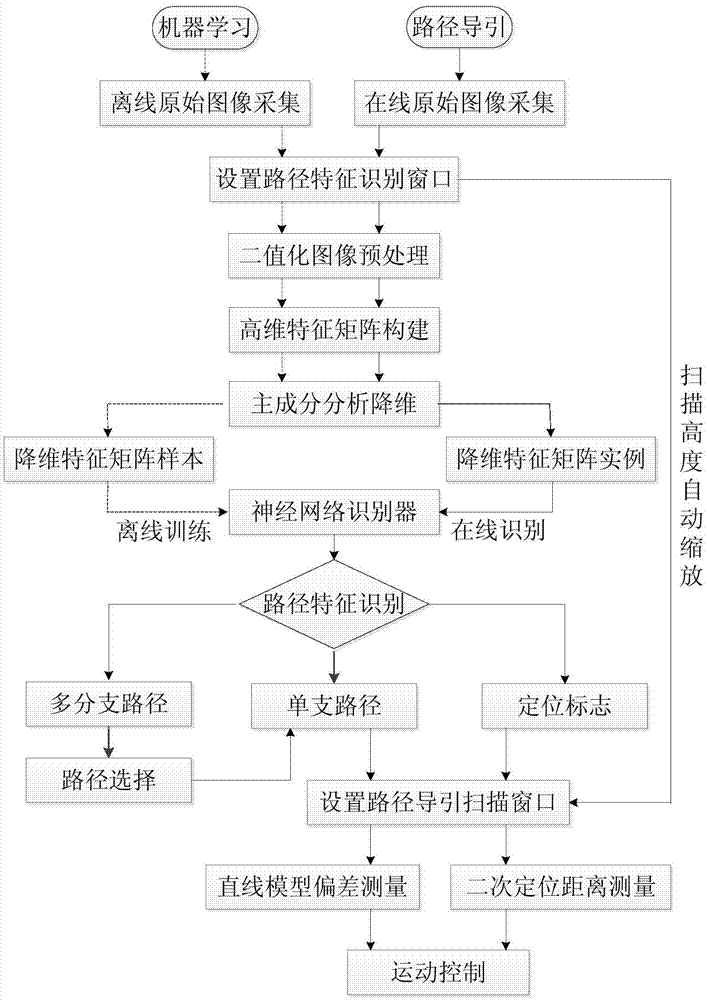
[0066] figure 1 It is a system flow chart of the path feature recognition, deviation measurement and precise positioning method based on dual-view windows according to the present invention. For path feature recognition, the system processing is divided into two stages. The first stage is the offline machine learning stage, and its process is indicated by the dotted arrow; the second stage is the online path guidance stage, and its process is indicated by the solid line arrow. Both stages need to go through the original image acquisition, setting the path feature recognition window, binarized image preprocessing, high-dimensional feature matrix construction, principal component analysis and dimensionality reduction. The difference is: the known offline machine learning stage The feature matrix sample of the path feature type is used to train the neural network recognizer...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap