

Control method of multi-mode wall cleaning robot
A technology for cleaning robots and control methods, which is applied to cleaning machinery, machine parts, and carpet cleaning, etc. It can solve problems such as high requirements for processing equipment, affecting the surrounding environment, and incomplete cleaning, so as to reduce sewage treatment costs and simplify sewage treatment devices. , Easy disassembly and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings of the description.
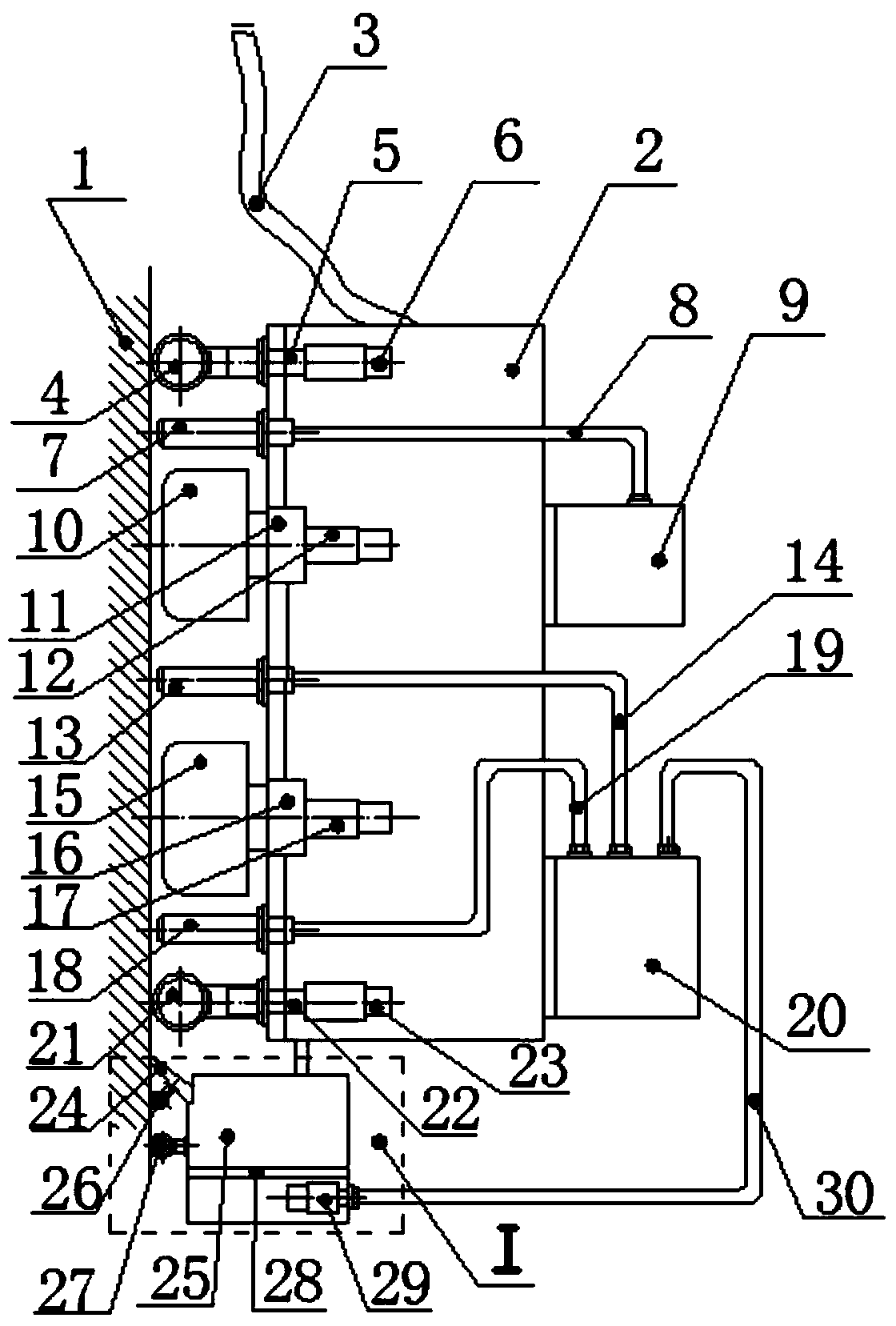
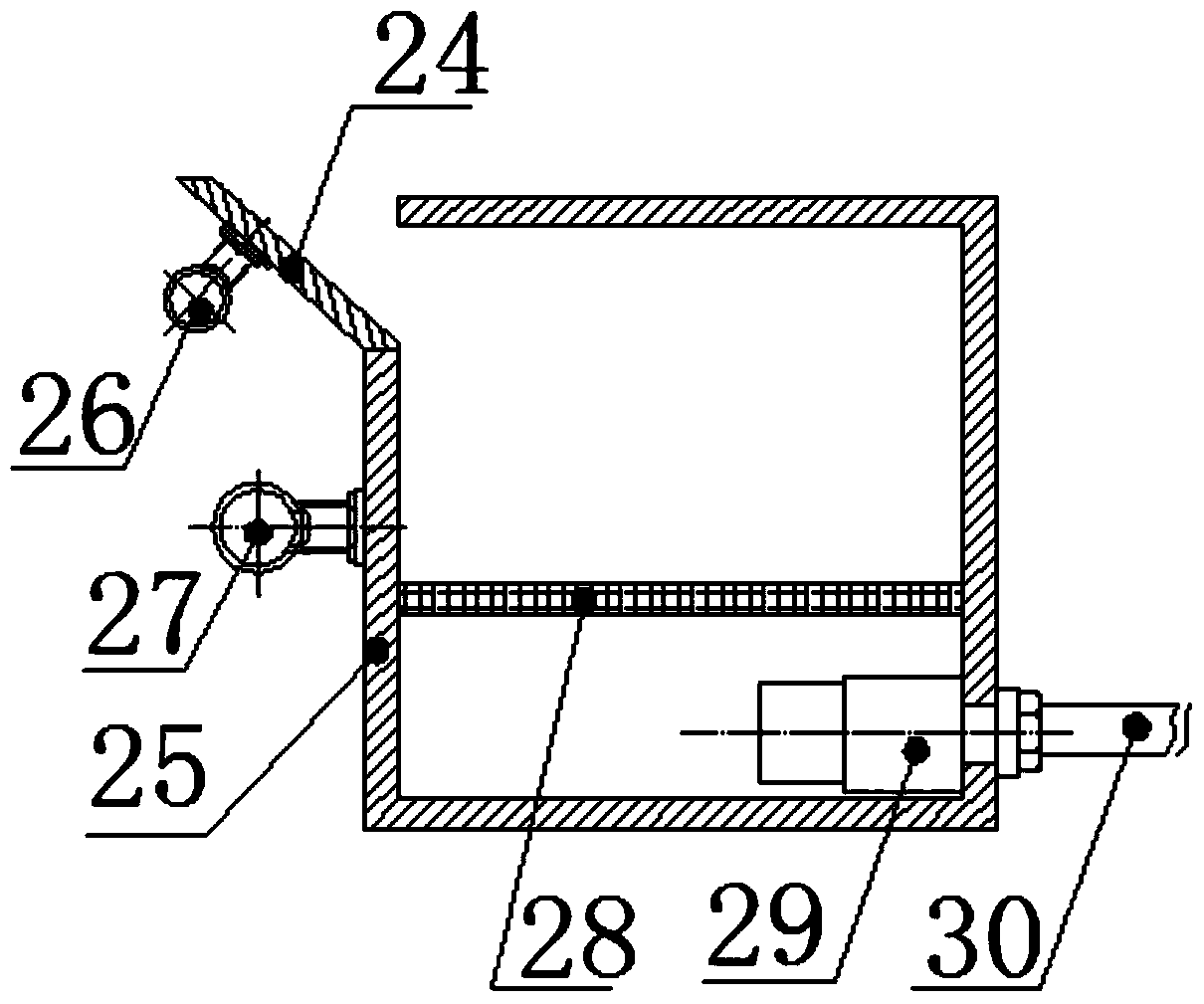
[0050] like figure 1 , figure 2 As shown, a multi-mode wall cleaning robot includes a frame 2, a rope 3, an upper telescopic mechanism 4, an upper screw nut pair 5, an upper telescopic motor 6, a first nozzle 7, a first conduit 8, an upper Water storage tank 9, first cleaning brush 10, first reducer 11, first deceleration motor 12, second nozzle 13, second conduit 14, second cleaning brush 15, second reducer 16, second deceleration motor 17. The third nozzle 18, the third conduit 19, the lower water storage tank 20, the lower telescopic mechanism 21, the lower screw nut pair 22, the lower telescopic motor 23, the collecting plate 24, the collecting box 25, the upper roller 26, the lower roller 27 , filter plate 28, submersible pump 29, submersible pipe 30,
[0051] The frame 2 is provided with a rope 3, and the upper telescopic mechanism 4 is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More