

Wrist of six-axis robot arm
A six-axis robotic arm and six-axis technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of assembly deviation, low transmission accuracy, and complex structure, and achieve the goal of reducing assembly difficulty, improving transmission accuracy, and reducing noise Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
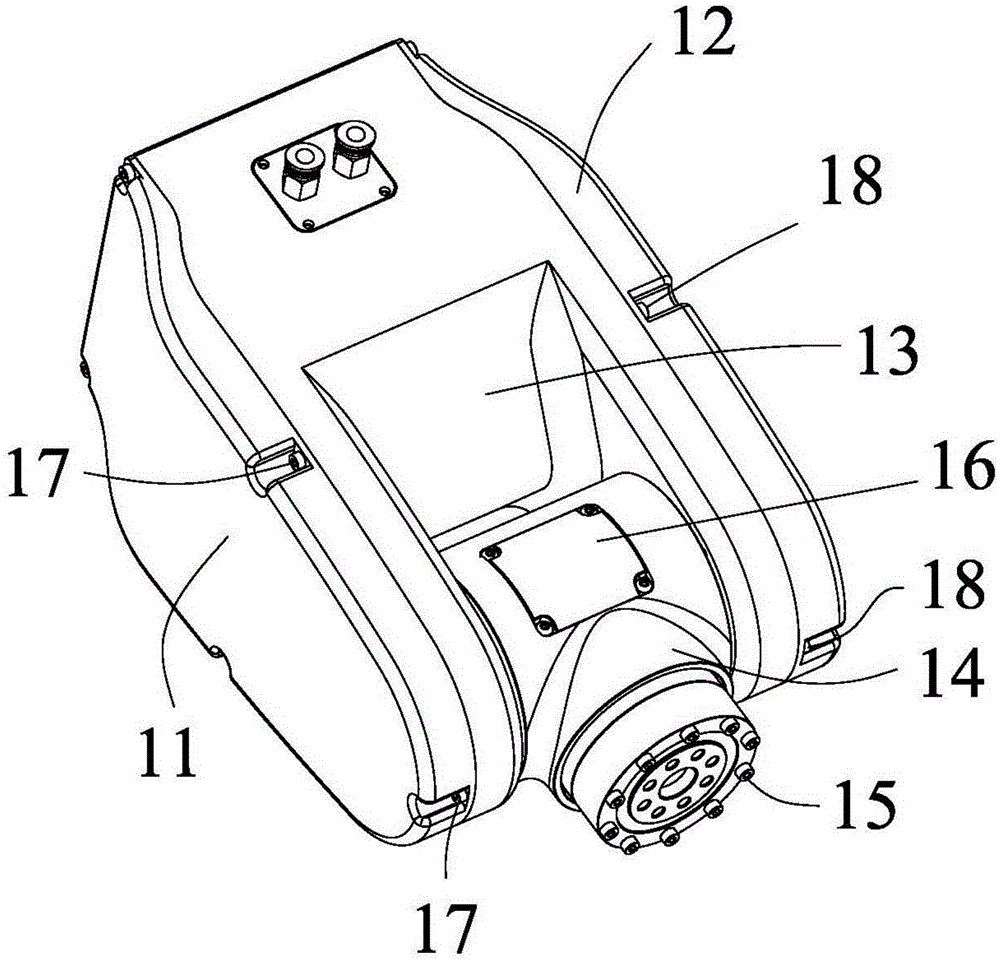
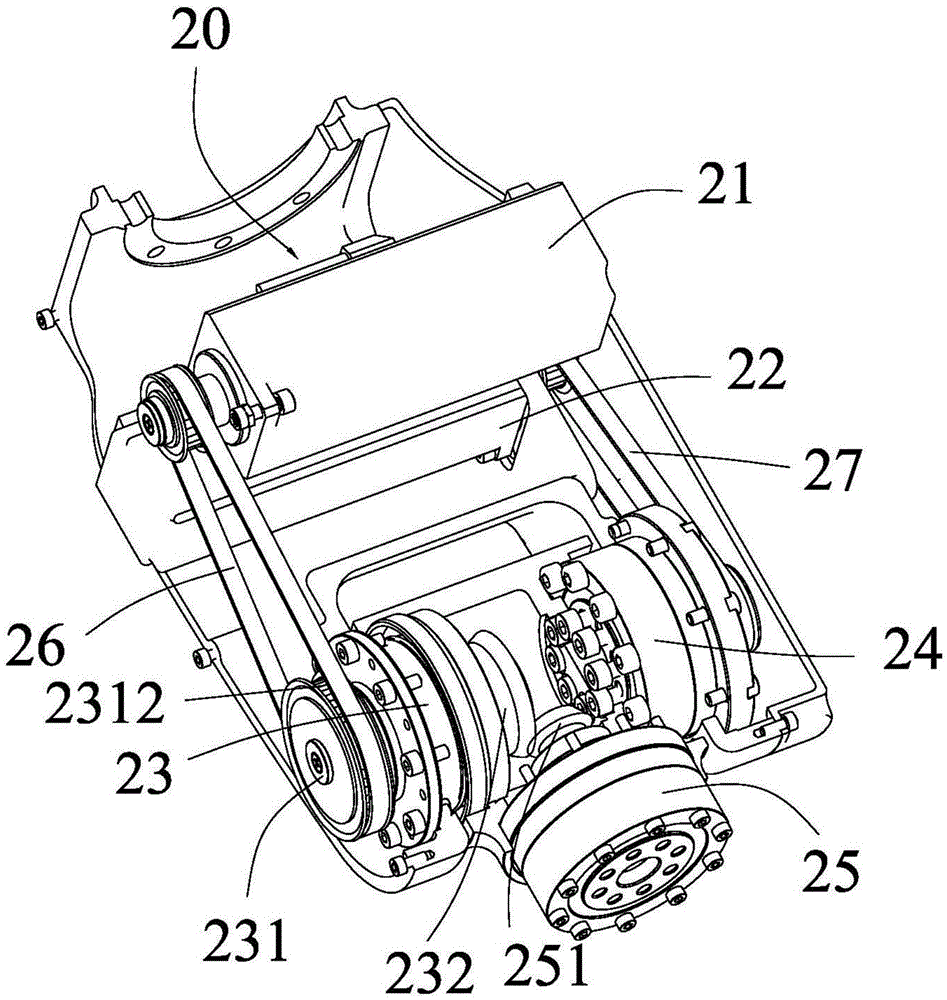
[0026] The present invention discloses a wrist 100 of a six-axis robotic arm, such as figure 2 with image 3 As shown, the wrist 100 includes a housing assembly 10 and a transmission structure 20 arranged inside the outer assembly 10. The housing assembly 10 of the wrist 100 includes: a first housing 11, a second housing 12, a support frame 13, and a five-six-axis housing 14 , the six-axis output end 15, and the observation cover 16 fixed on the five-six-axis housing 14. Wherein, the first shell 11 and the second shell 12 are respectively located on both sides of the support frame 13, and the first shell 11 is fixedly connected to one side of the support frame 13 through a plurality of first screws 17, The second casing 12 is fixedly connected to the other side of the support frame 13 through a plurality of second screws 18; the five-six-axis casing 14 is located in the middle of the support frame 13, and the six-axis output end 15 is located in the middle of the support fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More