

Three-translation high-speed sorting parallel manipulator
A three-translation and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as adverse effects of high-speed and high-dynamic response motion characteristics, limited working space size, increased structural complexity, etc., to improve motion dead points The effect of position problem, relatively simple kinematics, and easy assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will now be further described in conjunction with specific examples, and the following examples are intended to illustrate the present invention rather than further limit the present invention.
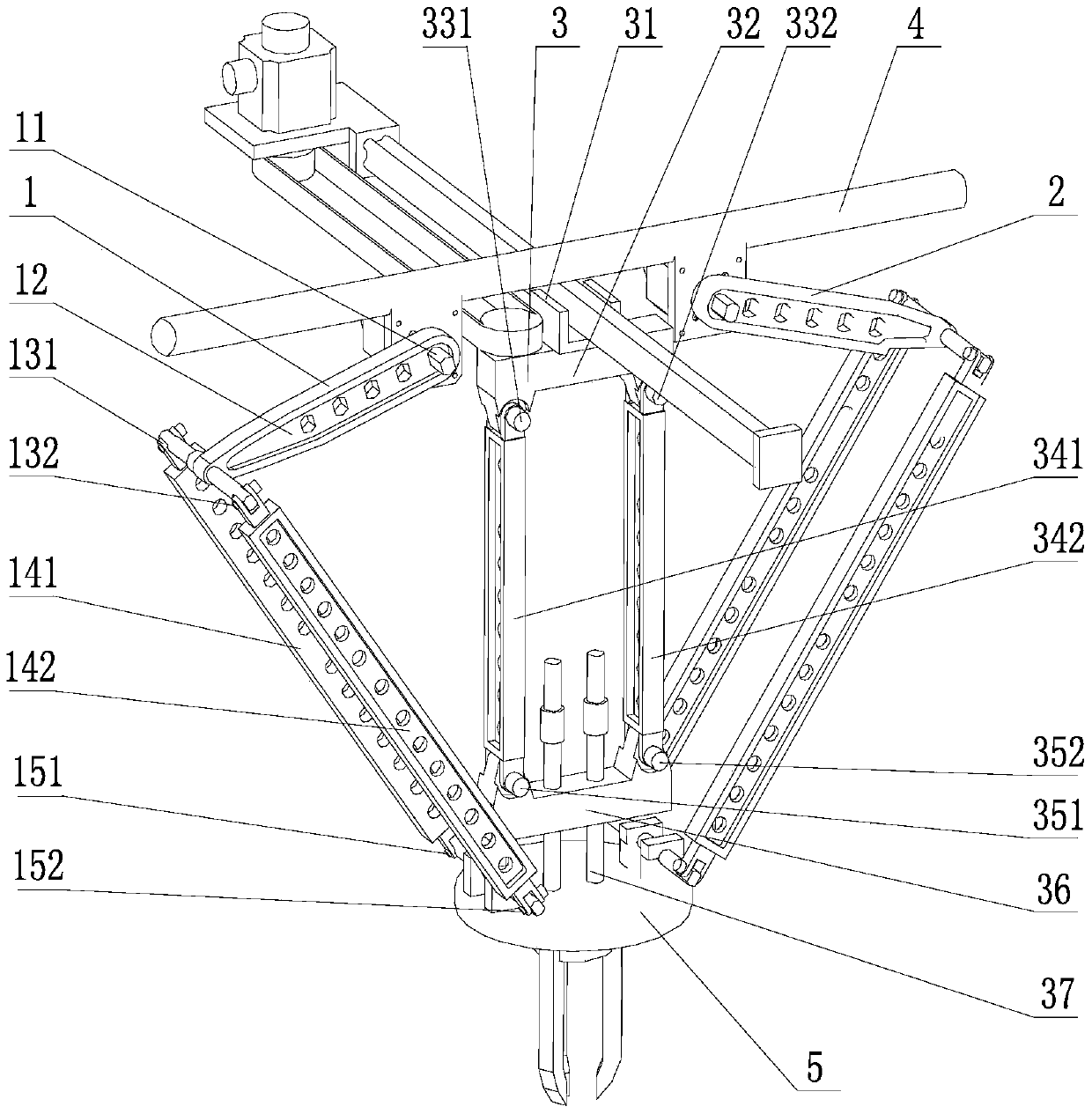
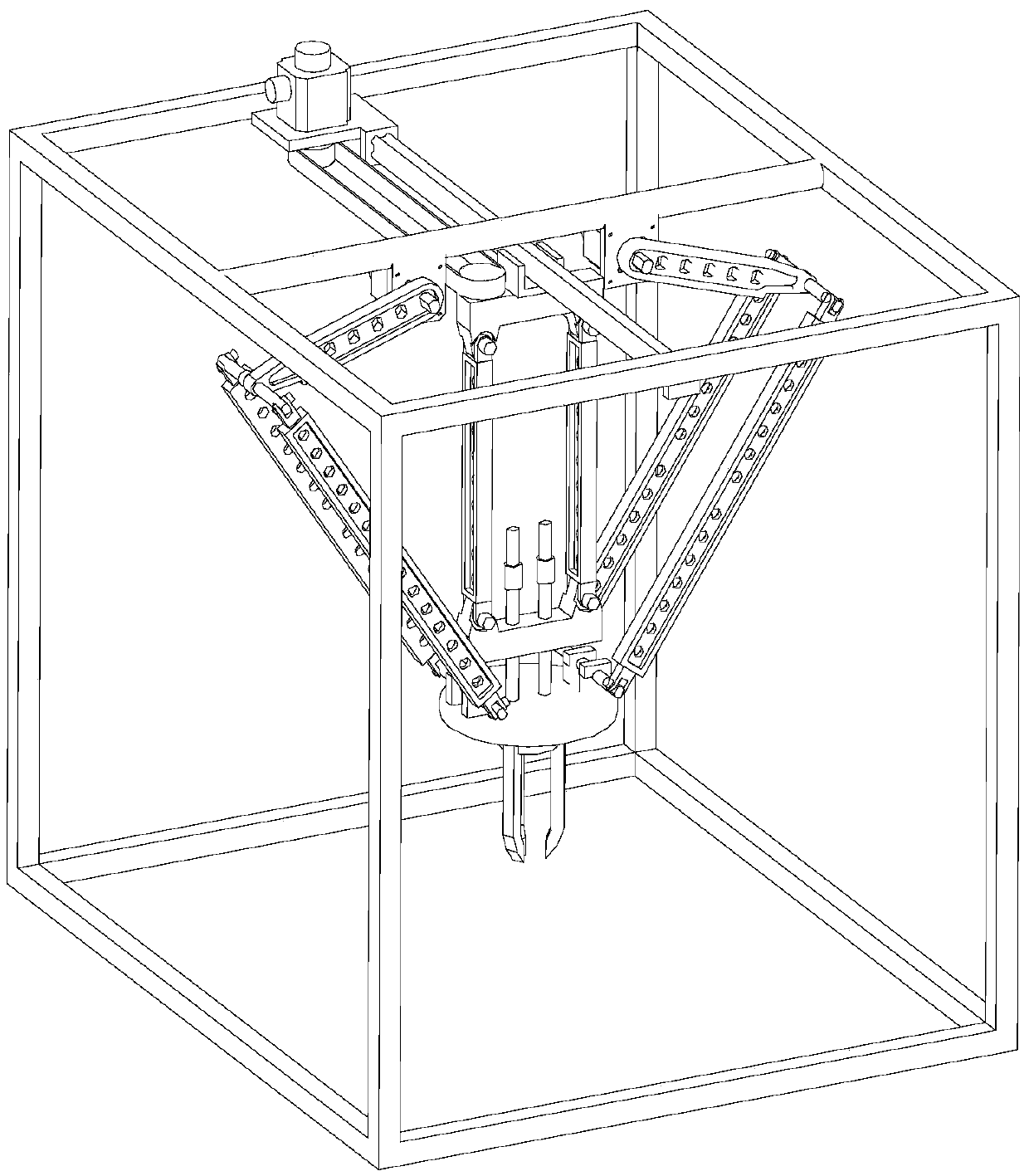
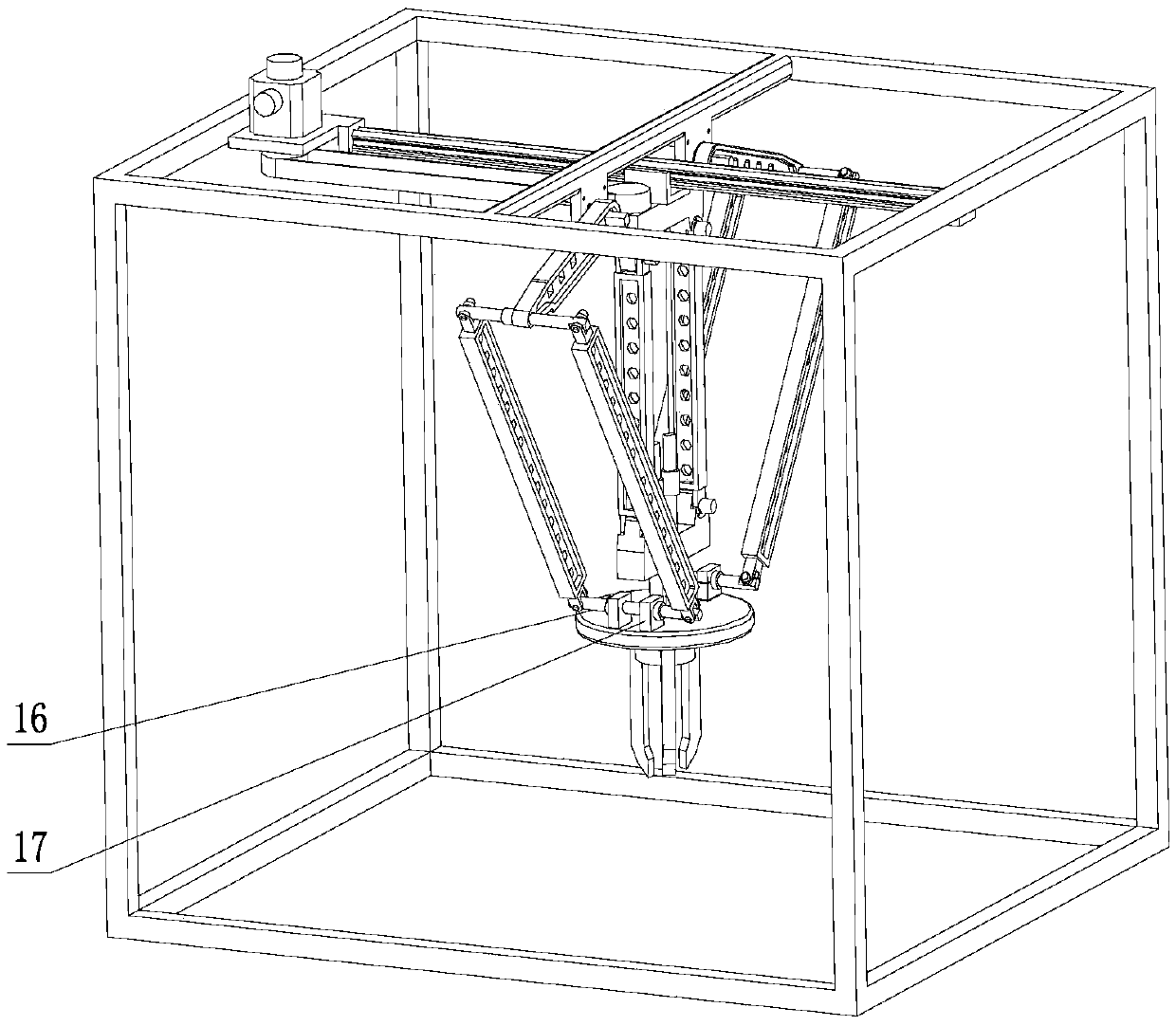
[0023] Such as Figure 1~3 A three-translation high-speed sorting parallel manipulator shown includes a fixed platform 4, a moving platform 5, and three branch chains connected between the fixed platform 4 and the moving platform 5. The first branch chain 1 includes the first branch chain connected in sequence. One swivel pair 11, the first driving arm 12, the second swivel pair, connecting rod, the third swivel pair, the first connector 16, the fourth swivel pair 17, the first swivel pair 11 is connected with the bottom of the fixed platform, and the fourth swivel pair The pair 17 is connected to the top of the moving platform 5, the connecting rods include a left connecting rod 141 and a right connecting rod 142 arranged side by side, and the second rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More