

Iterative learning trajectory tracking control and robust optimization method for two-dimensional motion mobile robot
A mobile robot, iterative learning technology, applied in the field of robot optimization control, can solve the problems of monotonic convergence characteristics and loose initial value of the system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
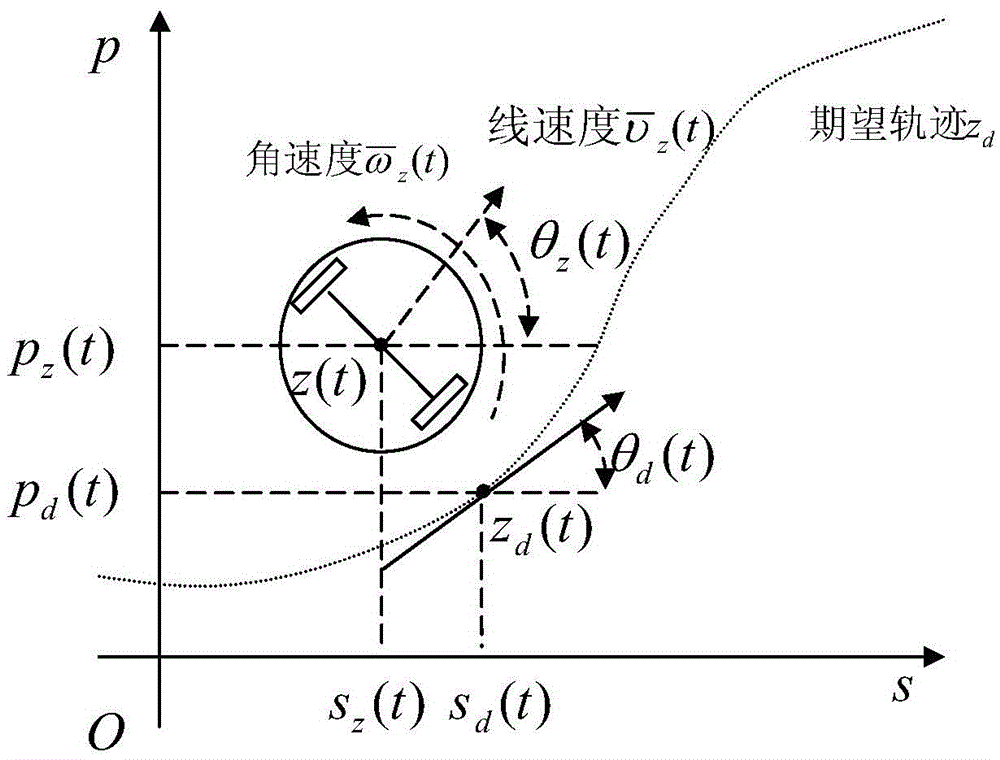
[0092] For such as figure 1 and the discrete nonlinear mobile robot system dynamics equation shown in formula (1), set the desired position trajectory s d (t)=cos(πt),p d (t)=sin(πt), Sampling time ΔΤ = 0.001s, the initial value of the state is set to x k (0)=[0.95,0.05,π / 2] T , the initial value of the control output is set to u 0 =[0,0] T , set the allowable error precision ε max ≤0.06, the off-period nonlinear state equation can be expressed as:
[0093] s z ( t + 1 ) p z ( t + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More