

Parallel multi-modal brain control method for complete grabbing operation of artificial hand
A multi-modal, prosthetic hand technology, applied in the field of intelligent robots, can solve the problems of non-prosthetic hand control technology research, and achieve the effect of improving accuracy and information transmission rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
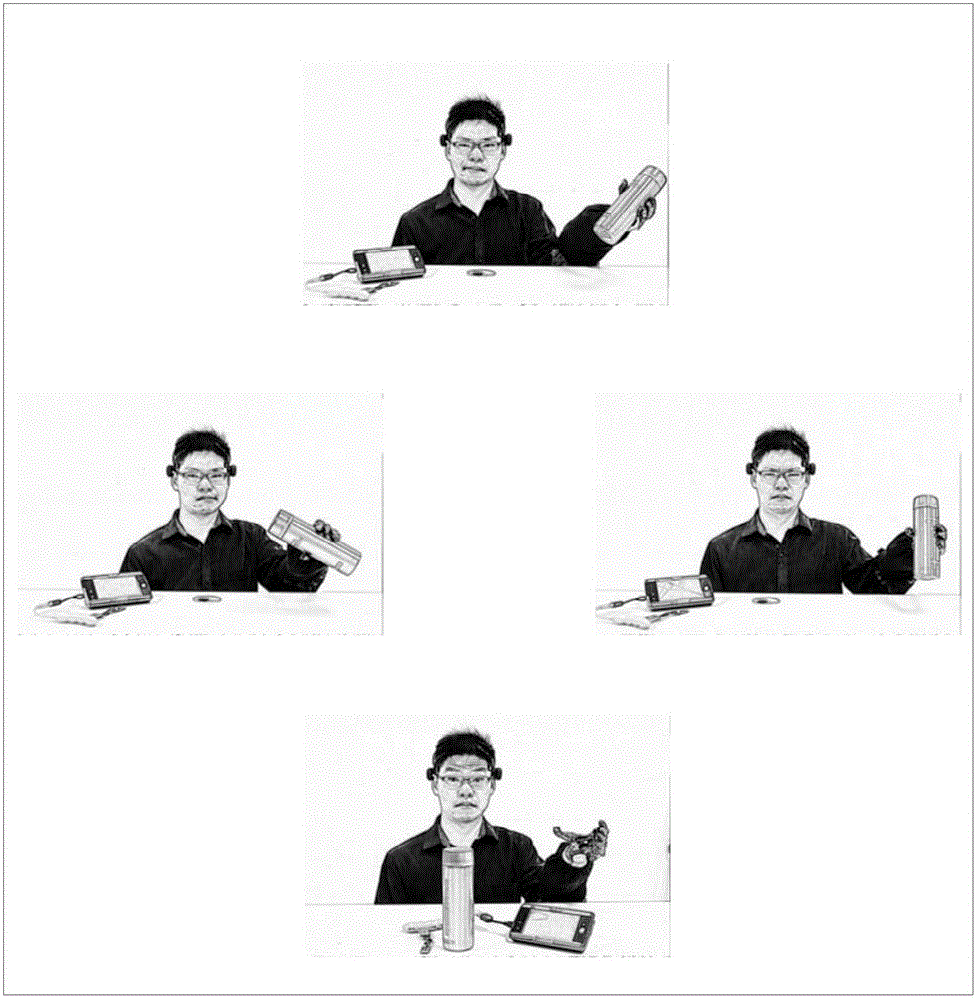
[0031] A parallel multimodal brain-controlled prosthetic device based on the complete grasping operation of the prosthetic hand, including: an EEG signal acquisition module worn on the subject's head, a portable signal processing module placed on the subject's waist, and a prosthetic hand driven Control module, prosthetic hand body module, bluetooth transmission module, communication module and scene animation visual eliciting module placed within the visual range of the subject, the scene animation visual eliciting module plays different actions decomposed and processed to the subject A flickering image of the scene to elicit EEG signals from the subject.
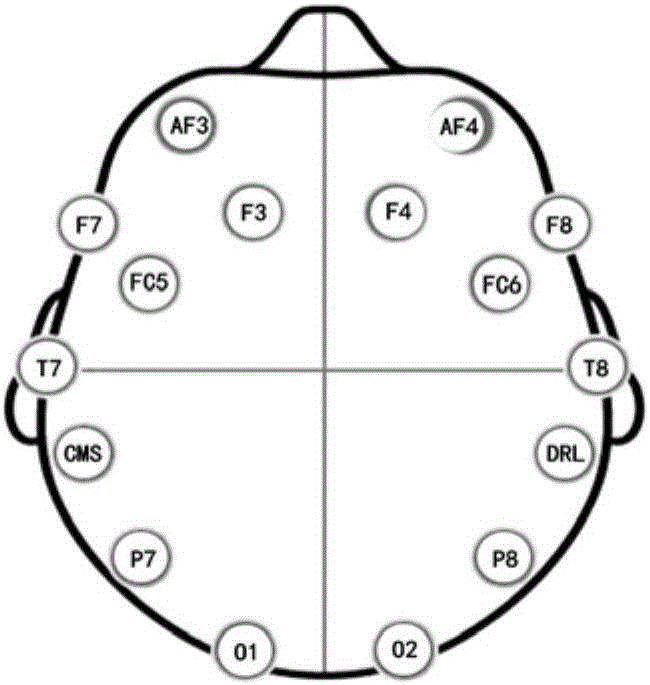
[0032] In the above scheme, the EEG acquisition module adopts the special portable EEG cap EMOTIV with its own amplification filter, and selects the F7, F8, O1, O2 channel signals under the international standard 10 / 20. The portable signal processing module adopts an embedded microprocessor. The EEG acquisition module and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More