

An Interactive Autonomous Coach Vehicle System
A coaching vehicle and interactive technology, applied in the field of interactive autonomous coaching vehicle system, can solve the problems of difficult driving essentials, limited coaches, and not much time to get on the coach, achieving the effect of simple structure and saving human resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
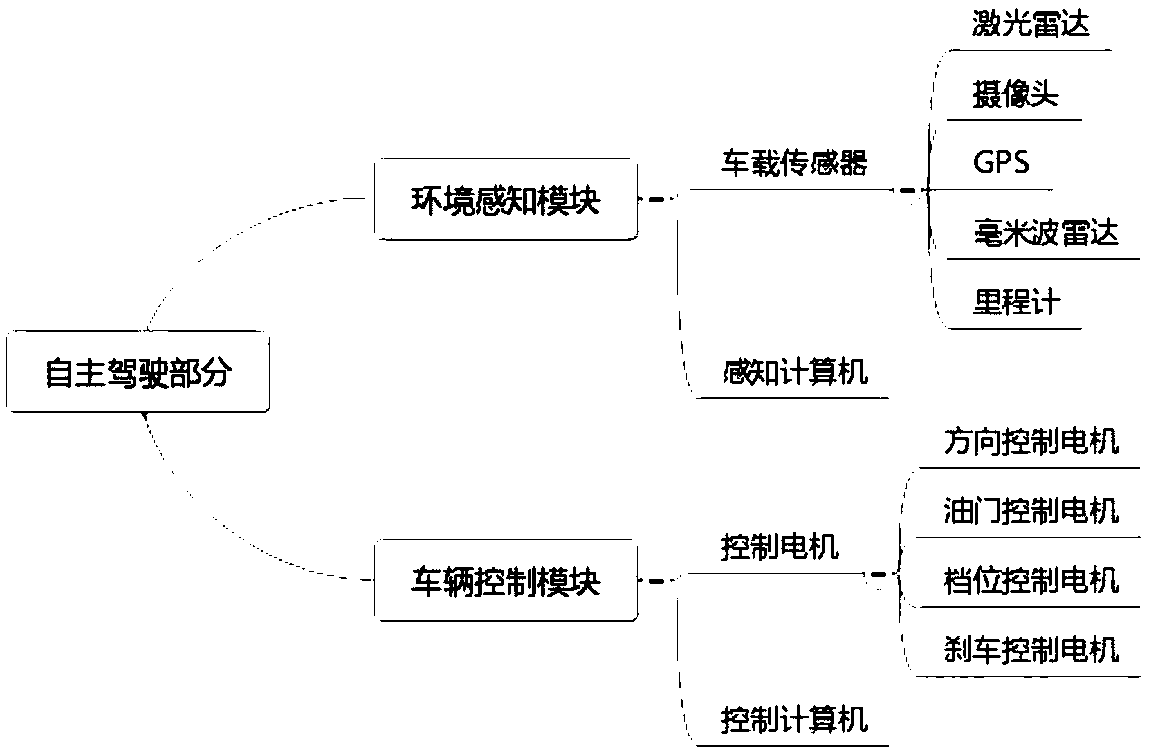
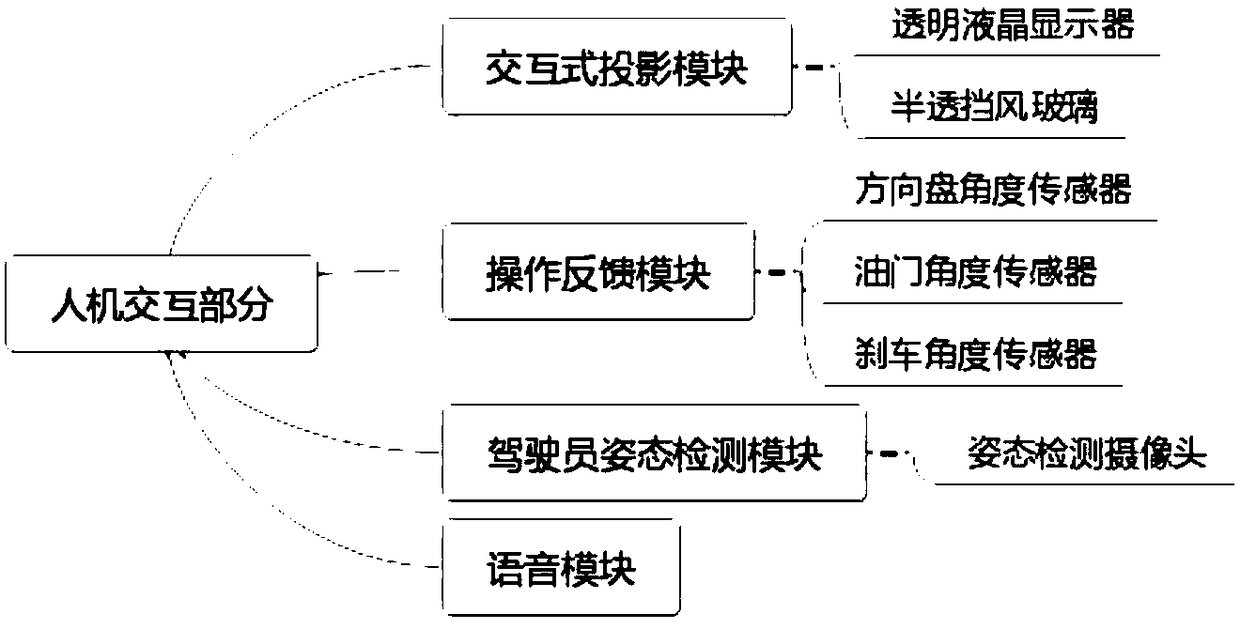
[0029] Embodiment 1, an interactive self-training vehicle system, including an environment perception module, a vehicle control module, an interactive projection module, an operation feedback module, a driver posture detection module and a voice module; wherein the environment perception module and the vehicle control module belong to The structure of the autonomous driving part is as follows: figure 1 , the interactive projection module, the operation feedback module, the driver posture detection module and the voice module belong to the human-computer interaction part, and its structure is as follows figure 2 .
[0030] The environmental perception module is used for the coach car to perceive the environment, and the obtained environmental information is sent to the interactive projection module and the vehicle control module; the environment includes static obstacles, lane lines, traffic signs, passable areas, and dynamic obstacles around the coach car; the environment Th...
Embodiment 2
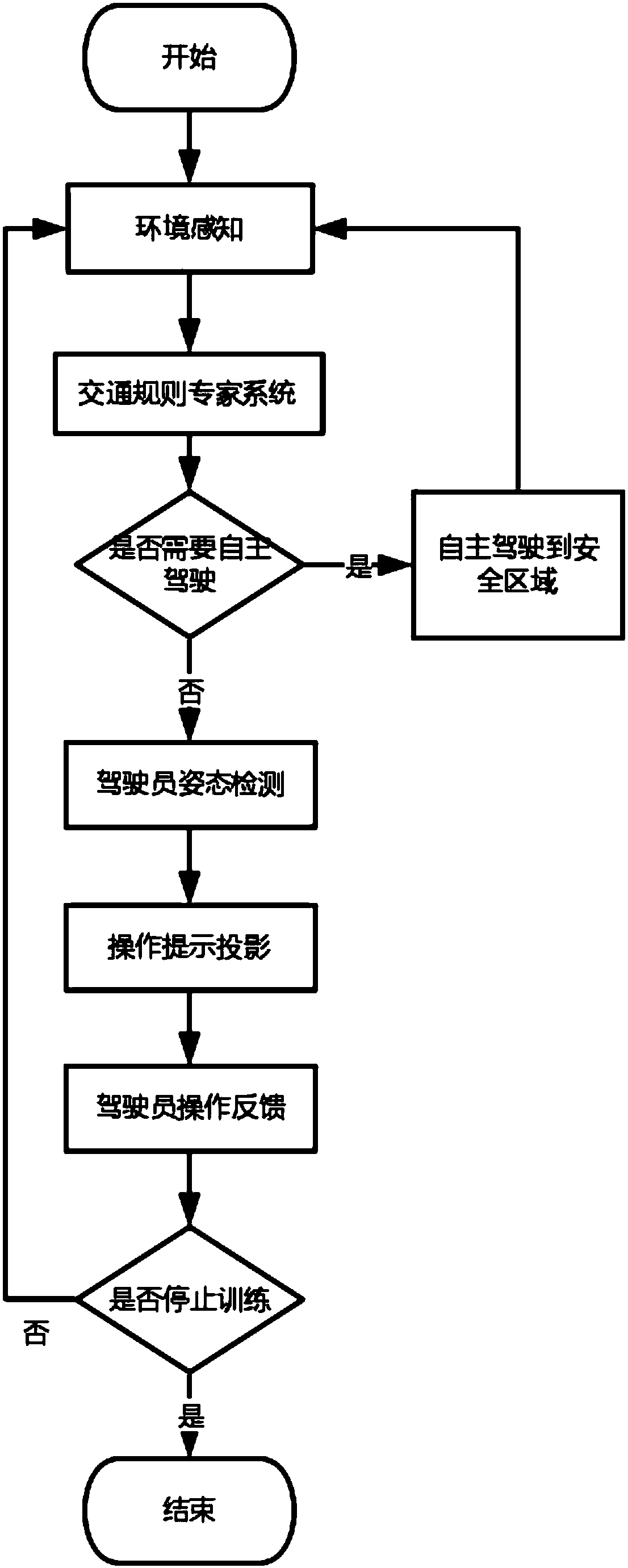
[0037] Embodiment 2, in addition, the present invention is also to provide a kind of software based on above-mentioned driving system, software process is as follows image 3 As shown, the software mainly includes the following steps:
[0038] Step 1 Perceives the surrounding environment of the vehicle according to the environment perception module, including but not limited to detection of lane lines, pedestrians, vehicles, obstacles, traffic signs and other environmental information.
[0039]Step 2 judges whether the current vehicle violates the traffic rules based on the environment sensed in step 1, and obtains the driver's operating status and the vehicle's own status according to the operation feedback module, where the driver's operating status includes the steering wheel angle, gear position, and brake accelerator angle opening , the state of the vehicle itself includes the direction of the vehicle, acceleration, etc. According to the environment perceived in step 1 an...
Embodiment 3
[0043] Embodiment 3, as Figure 4 As shown, the vehicle main body 1 is a vehicle whose steering wheel, gas pedal, brake and gear control modes have been modified, so that the vehicle can be controlled by both the driver and the computer.
[0044] The vehicle environment perception module is composed of a laser radar 2 , an environment perception camera 3 , and an on-board computer 5 . Among them, the laser radar 2 is used to measure the distance between the vehicle and the obstacles within a certain range in front of the vehicle, and transmit the data to the computer for processing. After the computer obtains the data of the laser radar, it calculates the accurate distance of the obstacles and other information. The camera 3 is used to transmit the front color image to the computer 5 for processing, and the computer detects information such as front pedestrians, vehicles, traffic signs, lane lines through machine vision algorithms.
[0045] The vehicle control module is compo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More