

Method for improving resolving success rate of medium and long baseline GPS integral cycle fuzziness
It is a technique of whole cycle ambiguity and medium and long base, which is applied in the direction of radio wave measurement system, satellite radio beacon positioning system, measurement device, etc. It can solve the problems of rejection, small Ratio value, and low accuracy of ambiguity real number solution, and achieves Improve the success rate, increase efficiency, improve the effect of success rate and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
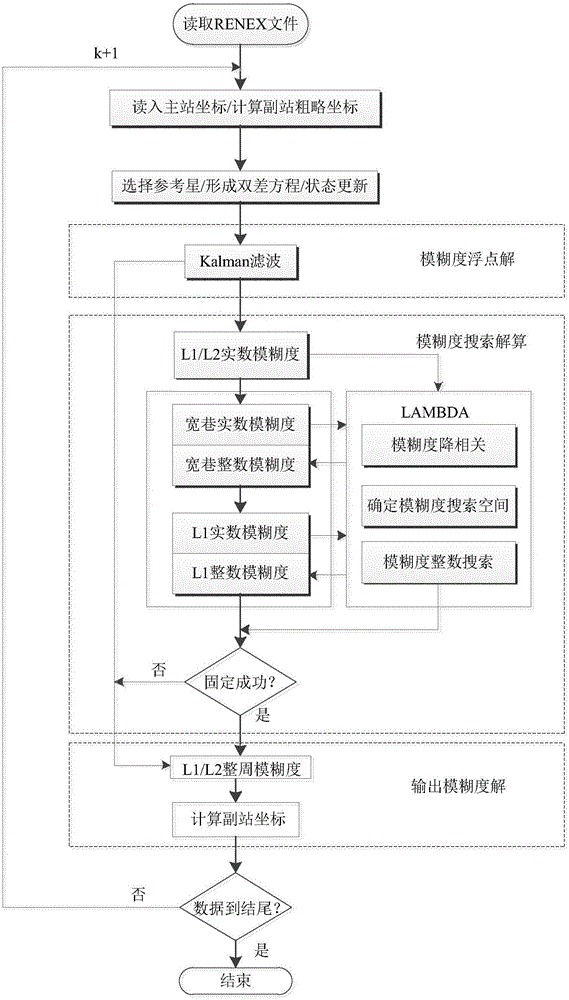
[0021] refer to figure 1 . According to the present invention, at first, use the monitoring and measuring software to extract useful observation data from the measurement data RINEX format files of the GPS receivers of the main and auxiliary stations through the preprocessing means such as the set height cut-off angle and carrier phase cycle slip detection ;Secondly, compare the observation data of the main and auxiliary stations to select the appropriate satellite as the reference star, establish the double-difference observation equation according to the observation value, use the Kalman filter to update the state of the observation equation and estimate the parameters, and solve the ambiguity floating point. Point solution; then, after transforming the floating-point solutions of the GPS carrier L1 and L2 integer ambiguities, the wide-lane ambiguity and the L1 ambiguity vector group are formed, and the integer solution of the wide-lane ambiguity is obtained by using the LAM...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More