

Body joint distributed information consistency estimation method based on interacting multiple models
An interactive multi-model, human joint technology, applied in the field of distributed information consistency estimation of human joint points based on interactive multi-model, can solve the data fusion center with high requirements for computing power and robustness, network instability resistance Weak, consistent estimation does not appear and other problems, to achieve the effect of easy expansion, reducing impact, and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention is described in detail below in conjunction with accompanying drawing:
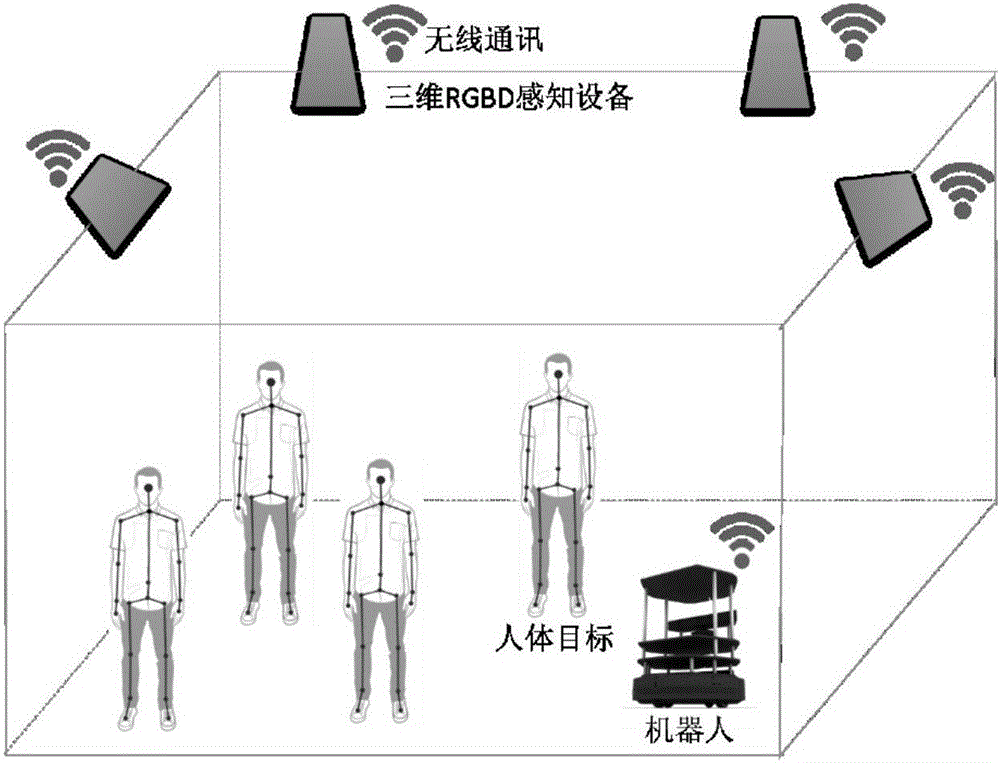
[0034] like figure 1 As shown, the distributed information consistency estimation method of human joint points based on interactive multi-model realizes distributed processing of data and distributed fusion of information by constructing a dynamic distributed RGBD sensor network, and there is no centralized information processing in the network With the fusion center, sensor nodes only exchange information with neighboring nodes, and through a limited number of consistency iterations, the estimation of the perceived target state in the network is consistent.
[0035] The sensor network realizes the transmission of information through wireless communication. Each sensor is connected to a local processor, which can be a microcomputer or an ARM development board. After the local processor processes the information, it exchanges network data with neighboring nodes through wirele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More