

Bionic regular-hexagon hexapod robot
A hexapod robot and regular hexagonal technology, which is applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of robot instability, untimely processing, robot behavior restrictions, etc., and achieve strong adaptability, performance improvement, The effect of flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0025] The invention provides a bionic regular hexagonal hexapod robot aiming at the limitation that the existing wheeled and tracked robots cannot reach the complex ground, and the defect of other existing footed robots that the walking is unstable.
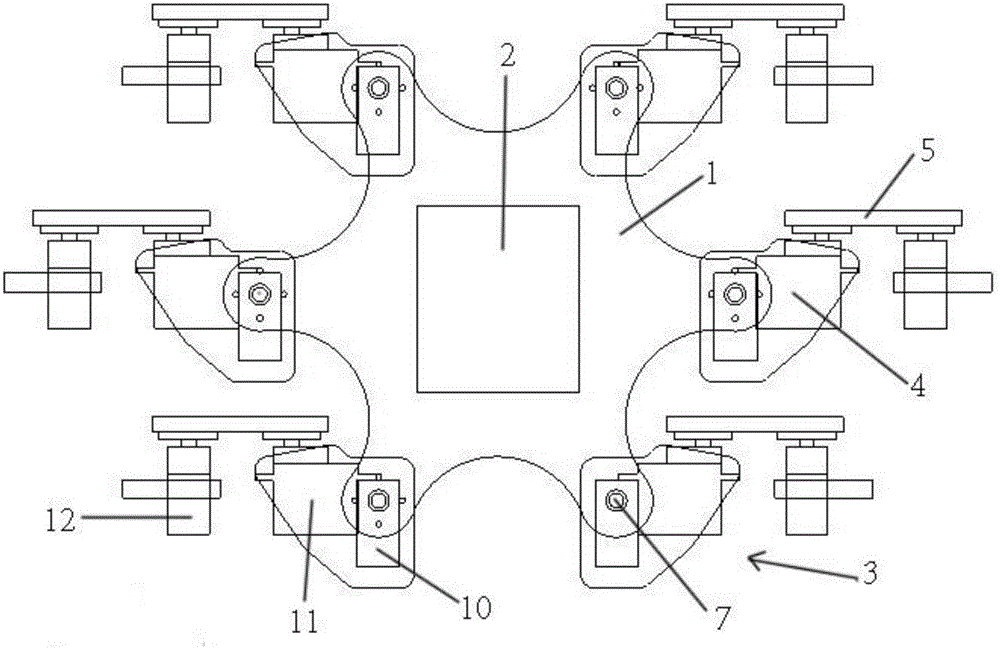
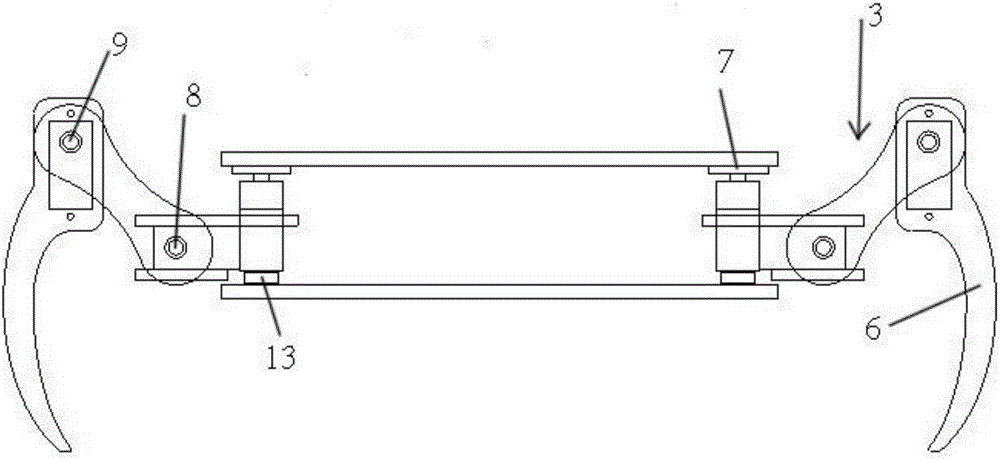
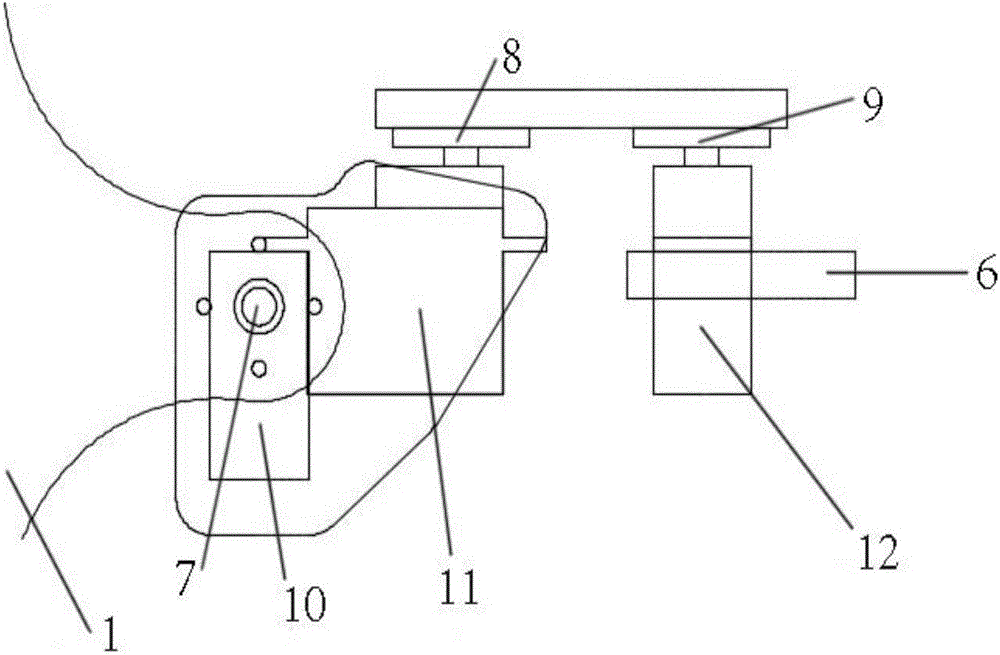
[0026] Such as figure 1 and figure 2 As shown, it is a schematic diagram of the structure of the robot. The robot includes a regular hexagonal body 1, a running mechanism and a closed-loop control system 2 for controlling the running mechanism. The running mechanism is a regular hexagonal frame, including three pairs of mechanical feet 3, as image 3 and Figure 4 As shown, each mechanical foot 3 includes a composite rotating arm 4, a short arm 5, a long arm 6 and a horizontal adjustment assembly 7 for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More