

Intelligent spinal anesthesia puncture robot system
A robotic system, spinal anesthesia technology, applied in surgical robots, puncture needles, computer-aided planning/modeling, etc., can solve the problems of patients' life troubles and pain, and achieve a reduction in the risk of anesthesia, pain reduction, and high stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing, the present invention will be further described:
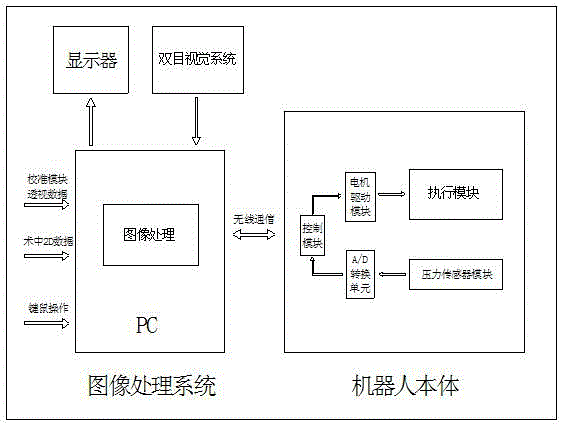
[0033] figure 1 It is a structural block diagram of the intelligent spinal anesthesia puncture robot system of the present invention, including two core modules of the robot body and the image processing system. Data communication is carried out between the robot body and the image processing system through a wireless network. The robot body is equipped with an execution module, a control module, an A / D conversion unit, a motor drive module and a pressure sensor module, wherein the pressure sensor module can detect the axial force on the puncture needle in real time. The pressure sensor module is connected to the control module through the A / D conversion unit, and the control module is connected to the execution module through the motor drive module. The control module will analyze the axial force of the puncture needle according to the pressure value collected in real t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More