

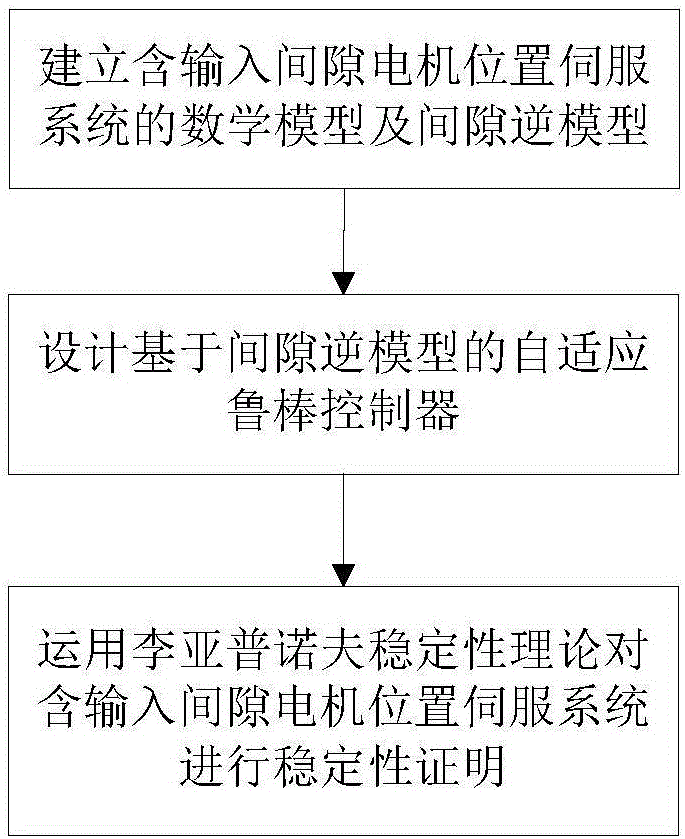
Motor servo system self-adaptive robustness control method including input interval
An adaptive robust, servo system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as large online calculation time, initial condition limit, large calculation amount, etc., to improve control performance , the effect of counteracting the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0070] The parameter values of the motor servo system are as follows:
[0071] J=0.01kg·m 2 , B=5N·m·rad-1·s -1 , m=1, B r = 1, B l = 1;
[0072] Now compare the following controllers:
[0073] (1) controller parameter k of the present invention's design 1 =800,k s1 =2000, Γ=diag{100,100}.
[0074] (2) PID controller parameter is k p =20,k i =650,k d = 0.1.
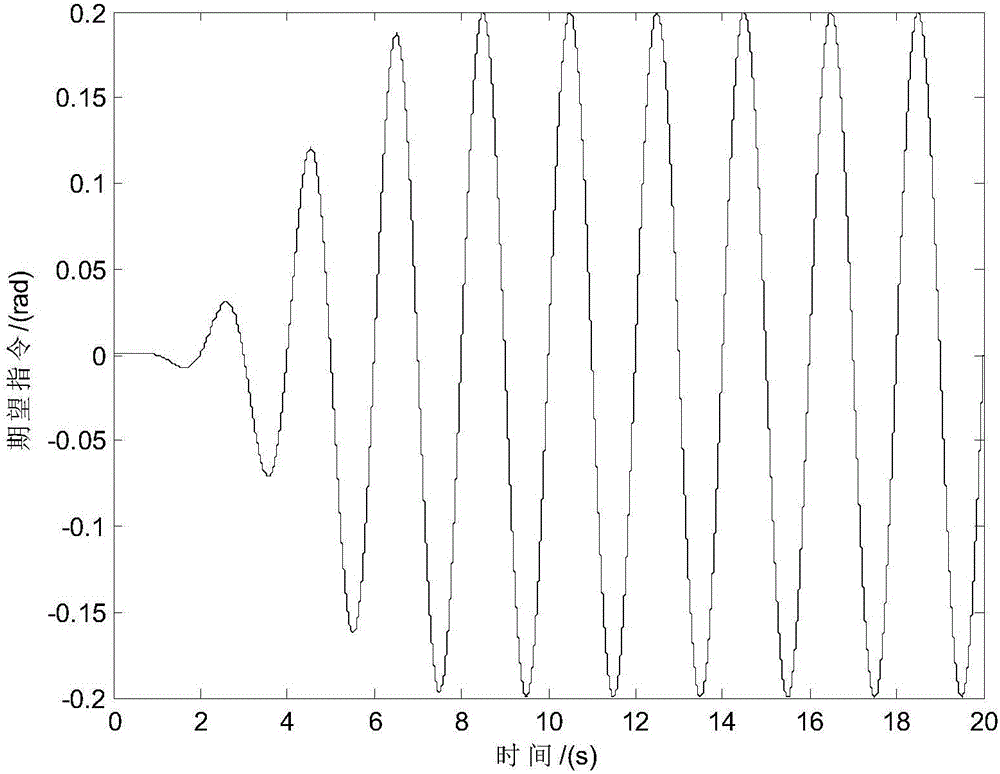
[0075] Position angle input signal
[0076] The effect of the control law:
[0077] figure 2 It is a schematic diagram of two kinds of controller trajectory tracking instructions.
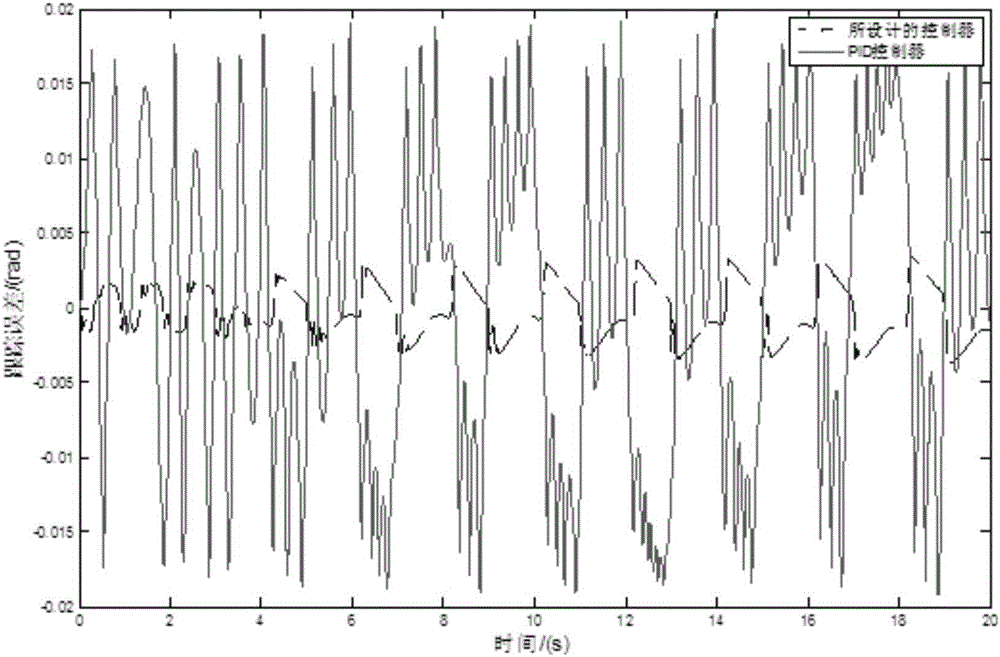
[0078] image 3 It is a curve graph of the tracking error of the two controllers changing with time, and it can be seen that the controller designed by the present invention is obviously better than the PID controller.
[0079] Figure 4 It is a curve diagram of the control input of the controller designed by the present invention changing with time. It can be seen from the figure that the control input signal obtained by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More