Region-matching-based fast electronic image stabilization method
A technology of area matching and fast electronics, which is applied in the direction of TV, electrical components, image communication, etc., can solve problems such as the inability to guarantee the unity of real-time performance and performance, the influence of motion vector of image acquisition equipment, and video shape distortion, etc., to achieve superior performance, Accurate and stable, optimized distortion effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0060] A fast electronic image stabilization method based on region matching, the present embodiment selects a video for a section of 10s / 298 frames, and the specific steps include:
[0061] (1) read out the video image frame, select the first secondary image frame as a reference frame, and the rest as image frames to be processed;
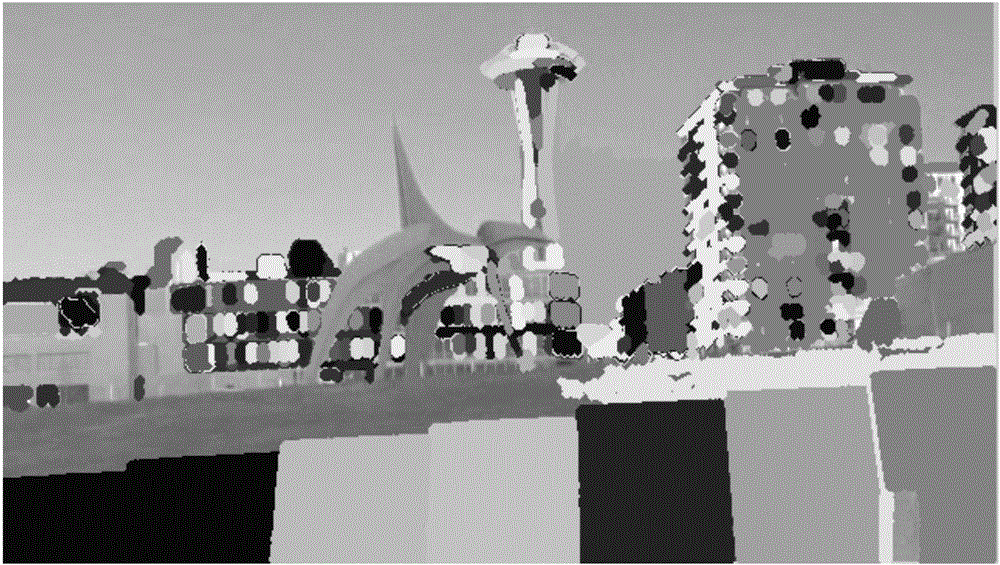
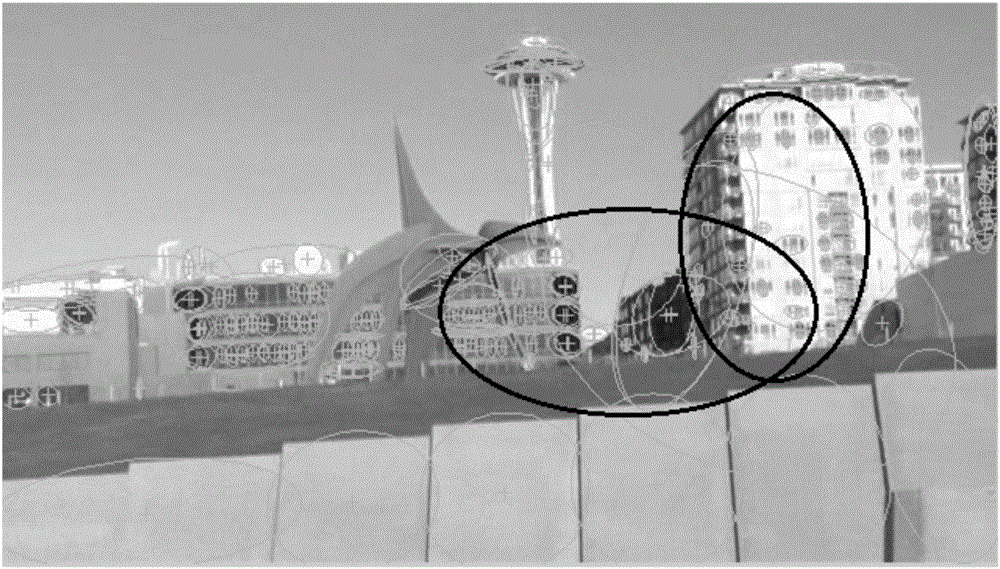
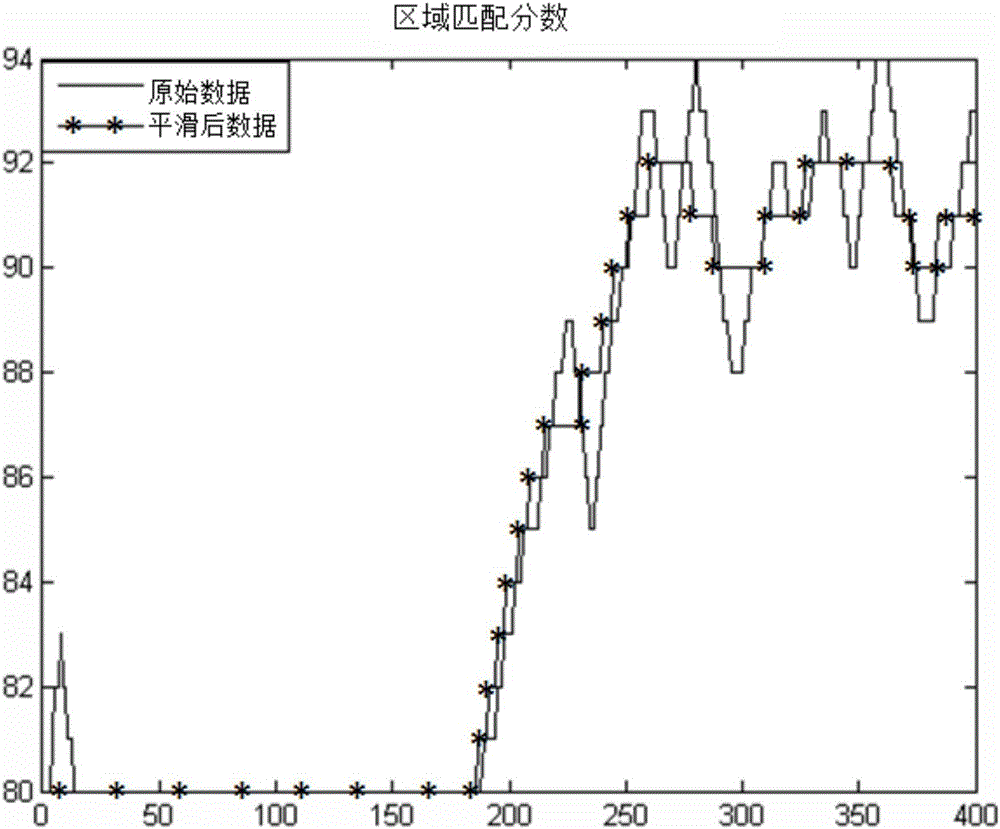
[0062] (2) Use the MSER maximum extremum stable region algorithm to extract the MSER feature region of the current image frame, sort all the extracted MSER feature regions according to the area from large to small, select the top 3 MSER feature regions, and compare the current frame with Perform area matching on the reference frame to obtain the matching score of the current frame, and the corresponding MSER feature area is used as the feature point extraction area. According to this method, the matching scores of all frames in the video are counted, and a curve is drawn. The abscissa of the curve is the frame of the current image frame The ordina...
Embodiment 2
[0071] A fast electronic image stabilization method based on area matching according to Embodiment 1, the difference is that,
[0072] In the step (2), the calculation formula of the matching score is as shown in formula (I):
[0073] D ( i ) = Σ m = 1 M Σ n = 1 N [ S i ( m , n ) * T ( m , n ) ] - - - ( I )
[0074] In formula (I), D(i) is the matching score between the i-th sub-image frame and the reference frame, S i (m,n) is the gray value at the reference frame coordinates (m,n), T(m,n) is the gray value at the current frame coordinates (m,n), and the coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



