

Mechanical hand capable of working on any 3D curve and action process for mechanical hand
A manipulator and curve technology, applied in conveyors, manufacturing tools, destacking of objects, etc., can solve the problems of unstable running speed, inability to stop the manipulator, insufficient power, etc., to improve the degree of automation, flexible grasping mechanism, automation high degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
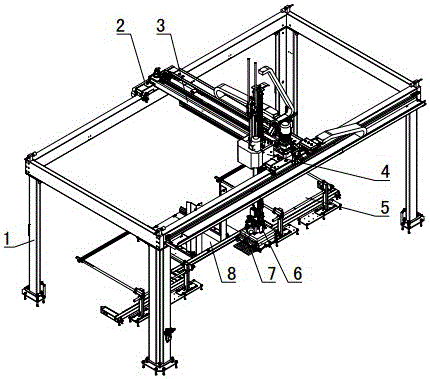
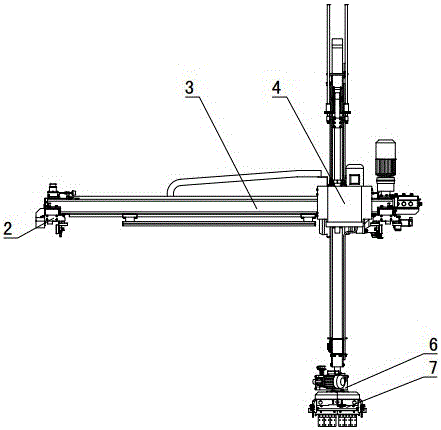
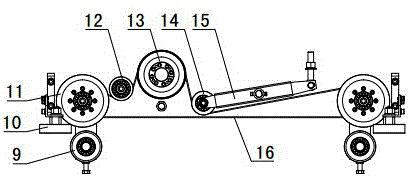
[0049] Figure 1~14 It is the best embodiment of the present invention, below in conjunction with attached Figure 1~14 The present invention will be further described.
[0050] A manipulator that can work on any 3D curve, including a frame 1, a traveling mechanism, a w-axis rotating mechanism 6, and a grabbing mechanism 7. The traveling mechanism is installed on the frame 1 and can move along the x-axis, y-axis, and z-axis respectively. Move, the w-axis rotation mechanism 6 is installed on the walking mechanism, and the grasping mechanism 7 is installed on the w-axis rotation mechanism 6; Mechanism and Tile Grabbing Mechanism. The grasping mechanism 7 of the manipulator is installed on the w-axis rotation mechanism 6, which increases the degree of freedom of the grasping mechanism 7 and makes the grasping mechanism 7 more flexible, so that the manipulator can also control the posture of the tiles while moving the tiles. It can be transformed so that the tiles can be stacke...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More