Two-machine intersection positioning method based on airborne opto-electronic platform
A rendezvous positioning and photoelectric platform technology, applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems of limited applicability, affecting the practicality of the battlefield, and cannot guarantee real-time positioning, so as to achieve high applicability and increase the use distance Range, high mobility effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below with reference to the accompanying drawings and examples.
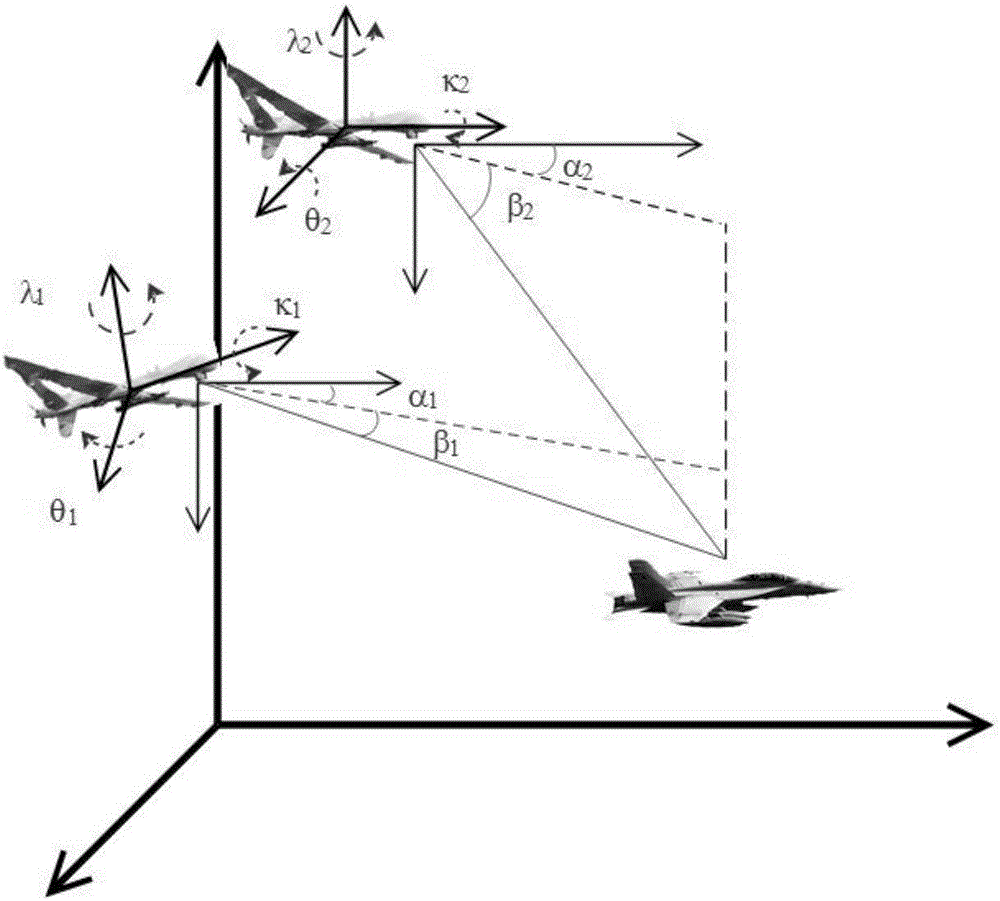
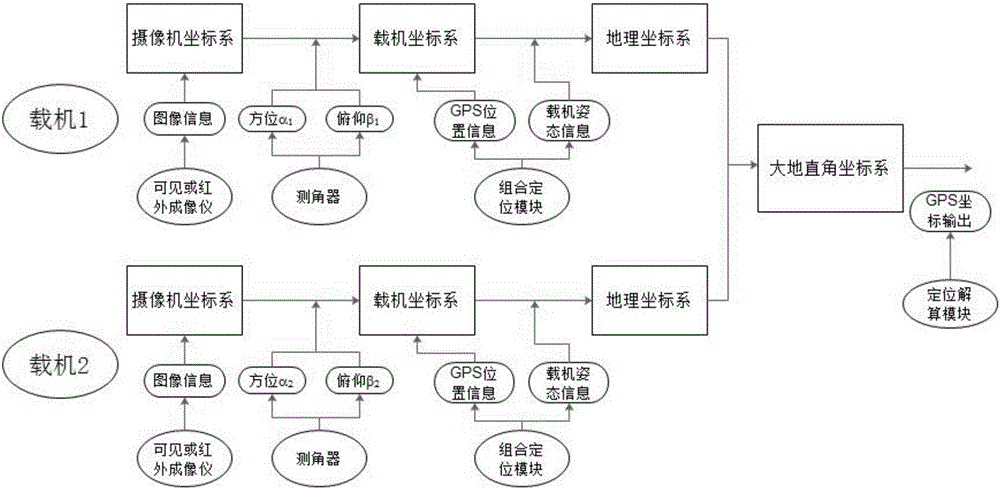
[0038] The invention provides a dual-aircraft rendezvous positioning method based on an airborne photoelectric platform, using two unmanned aerial vehicles to locate stationary or maneuvering targets, such as figure 1As shown, the airborne optoelectronic platforms of the two UAVs are equipped with infrared thermal imaging cameras, visible light cameras, goniometers, signal processing units and communication modules, and the signal processing units establish signal connections with each device. It is used to collect measurement data and calculate the target position, and the communication module is used to receive and send measurement data. The positioning method is shown in 2, and specifically includes the following steps:
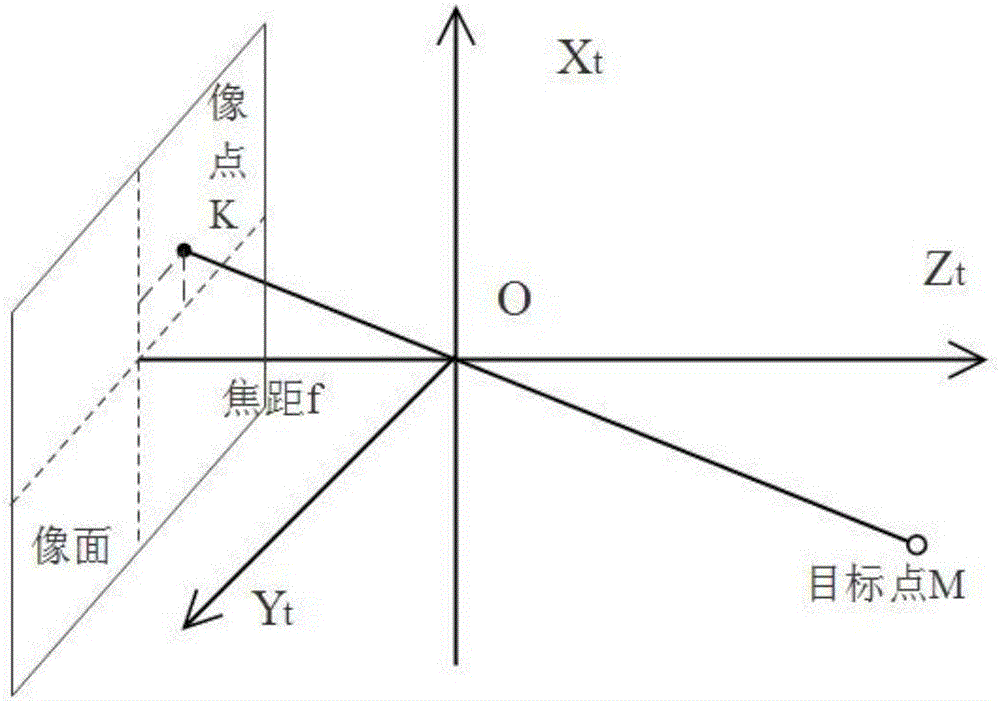
[0039] Step 1. Establish auxiliary coordinate systems: camera coordinate system, aircraft coordinate system, aircraft geographic coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com